|
|
��
��
��
��
��
s
b
g
l
.
j
d
z
j
.
c
o
m
|
 |
һ����в�ȷ���Ļ�����ϵͳ��ɢ³��������ٿ�������� |
|
|
| һ����в�ȷ���Ļ�����ϵͳ��ɢ³��������ٿ�������� |
|
���ߣ����� ������Դ������ ������� ����ʱ�䣺2008-9-24 9:57:13  |
|
Ҷ���� ��ҫ�� �����
������������ѧ�Զ���ѧԺ
1 ���Ԫ�
��ϵͳ�Ŀ��Ʋ�����Ҫ��Ϊ���п��ƺͷ�ɢ���ơ����ڴ�ϵͳ���ɼ�ʮ�������ϰٸ���ϵͳ�������ɣ����ж�Ŀ�ꡢ��ά�����ص㡣���ڻ����������ʶ����ȷ��ԭ�������ģ�Ͳ�����ȷ������ϵͳ�ļ��п���������Ҫ����ߣ�ʹ���п�������ʵ����1��2������
��ϵͳ�ķ�ɢ����һֱ�ǿ������۹����߹�ע����Ҫ���⡣���ص��Ƕ�ÿ����ϵͳ�������п��ƣ�������ֻ����ϵͳ����Ϣ����ij����ϵͳ��������ϵͳʧȥ��ϵʱ������Ӱ������ϵͳ���ȶ��ԡ�����������˴�ϵͳ�Ŀɿ��Ժ��ݴ��ԡ�Ҳ����Ϊ��ˣ���ɢ���Ƴ�Ϊ��ϵͳ���������е�һ��ʮ�ֻ�Ծ�ķ�֧����
�������һ����в�ȷ���Ļ�����ϵͳ�о��˷�ɢ³�����ٿ�������������⡣��������³���ȶ��ͽ������ٵ�֤��������
2 ϵͳ��������
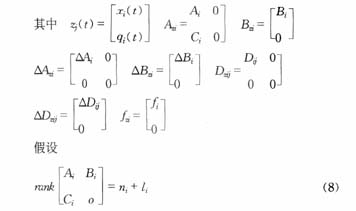
����һ����N����ϵͳ���ɵIJ�ȷ���Ĺ�����ϵͳ����ϵͳ����Ϊ��
 ��״̬���������������������������i��Bi��Ci�ֱ�Ϊ�����ʵ�ά���ij���������Ai��Bi�ǿɿصģ�����i����Bi�ͦ�Dij�Dz�ȷ���أ�DijΪj��ϵͳ�Ե�i����ϵͳ�Ĺ������þ���
�������ǿ��ǵIJ�ȷ�����ṹ�ģ������ǽ���֪�������Щ��ȷ�������������ޣ����裬������֪�Ǹ�������i,��i,��ij����ij��ʹ�ã�
��״̬���������������������������i��Bi��Ci�ֱ�Ϊ�����ʵ�ά���ij���������Ai��Bi�ǿɿصģ�����i����Bi�ͦ�Dij�Dz�ȷ���أ�DijΪj��ϵͳ�Ե�i����ϵͳ�Ĺ������þ���
�������ǿ��ǵIJ�ȷ�����ṹ�ģ������ǽ���֪�������Щ��ȷ�������������ޣ����裬������֪�Ǹ�������i,��i,��ij����ij��ʹ�ã�
 ���Ľ����������ϼ���IJ�ȷ���Ļ�����ϵͳ��ÿ����ϵͳ���һ��״̬������������ʹ�ó��ıջ�ϵͳ³���ȶ����ܽ���������������IJο����롣����
3 ��ɢ³��������ٿ���������ƪ�
Ϊ�˵õ���ɢ³��������ٿ�����������������չϵͳ��3��4������
���Ľ����������ϼ���IJ�ȷ���Ļ�����ϵͳ��ÿ����ϵͳ���һ��״̬������������ʹ�ó��ıջ�ϵͳ³���ȶ����ܽ���������������IJο����롣����
3 ��ɢ³��������ٿ���������ƪ�
Ϊ�˵õ���ɢ³��������ٿ�����������������չϵͳ��3��4������

 ����չϵͳ(7)�ľ���Azi��Bzi�ǿɿصġ���
�ٶ�������ϵͳ��״̬�ǿ���ֱ�Ӳ����ģ���ÿ����ϵͳ���һ����ɢ³�����ٿ�����
��6�������ƹ������£�
ui(t)=-Kizi(t) (9)��
���У�Ki��Rmi��ni�ǵ�i����ϵͳ�ķ�ɢ�������������
4 ³���ȶ�����������֤����
֤����Ϊ�����֪�
(1)³���ȶ���6��
����ʽ(7)��ʾ��ϵͳ����������ʽ(9)��ʾ�ķ���������������Ե������ϱջ�ϵͳ��
����չϵͳ(7)�ľ���Azi��Bzi�ǿɿصġ���
�ٶ�������ϵͳ��״̬�ǿ���ֱ�Ӳ����ģ���ÿ����ϵͳ���һ����ɢ³�����ٿ�����
��6�������ƹ������£�
ui(t)=-Kizi(t) (9)��
���У�Ki��Rmi��ni�ǵ�i����ϵͳ�ķ�ɢ�������������
4 ³���ȶ�����������֤����
֤����Ϊ�����֪�
(1)³���ȶ���6��
����ʽ(7)��ʾ��ϵͳ����������ʽ(9)��ʾ�ķ���������������Ե������ϱջ�ϵͳ��

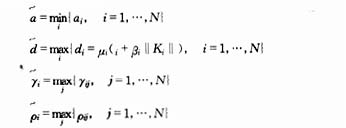
���ǵ�ÿ����ϵͳ�����ܿصģ���ˣ������ܿ���ѡȡ�ʵ��ľ���Ki��ʹ�þ����zi
-BziKi����������ֵ�����и�ʵ�������������죬�������������i��ai��ʹ�ã���
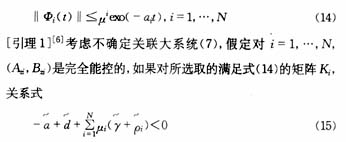 ����������о���K��i�Ŀ�����(9)�Dz�ȷ������ϵͳ(7)��һ��³���ȶ�����ɢ�����������У�
����������о���K��i�Ŀ�����(9)�Dz�ȷ������ϵͳ(7)��һ��³���ȶ�����ɢ�����������У�
 ��
(2)����������5������
�ڿ�������(9)�£�ϵͳ����д��������ʽ�� ��
(2)����������5������
�ڿ�������(9)�£�ϵͳ����д��������ʽ��
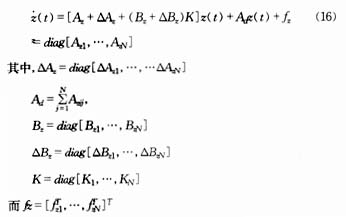 ��
�����Ŷ���ο������Ϊ���������ʽ(16)������ ��
�����Ŷ���ο������Ϊ���������ʽ(16)������
 ����ϵͳ(6)�������ٲο�����(֤��)����
5 ���۪�
������Ծ��в�ȷ�������Ĺ�����ϵͳ���ó��˷�ɢ³�����ٿ���������Ʒ��������Դ˿����������µıջ�ϵͳ������³���ȶ���������������Ե�֤�����÷�������������Ч��������
�ο����ת�
��1��Boyd s L��EI Ghaoui,E Feron et aL.Linear matrix inequalities in system and control theory��R��.Philadelphia:SIAM,1994��
��2������馣������.һ�ȷ����ϴ�ϵͳ��³����ɢ���ƣ�J��.��������ߣ�vol 15.NO3,2000�ꪥ
��3�ݳ±�.һ��������ƽṹ����ϴ�ϵͳ��³�����ƣ�J��.����������Ӧ�ã�1998��15(2)��203-209��
��4������������÷������.���в�ƥ�以����������ϴ�ϵͳ�ķ�ɢ���Ƽ�������ٵ�LIM������J��.��������ߣ�2000��7�£�VOL15��N04��
��5�ݳ�������������л����������.ʱ�ʹ�ϵͳ��ɢ³�����ٿ�������ƣ�LMI������J��.��������ߣ�2001��1�£�VOL16��NO1��
��6���ҽ����������պ�ҵ.³���������ۼ���Ӧ�ã�M��.�㽭��ѧ�����磬2000
����ϵͳ(6)�������ٲο�����(֤��)����
5 ���۪�
������Ծ��в�ȷ�������Ĺ�����ϵͳ���ó��˷�ɢ³�����ٿ���������Ʒ��������Դ˿����������µıջ�ϵͳ������³���ȶ���������������Ե�֤�����÷�������������Ч��������
�ο����ת�
��1��Boyd s L��EI Ghaoui,E Feron et aL.Linear matrix inequalities in system and control theory��R��.Philadelphia:SIAM,1994��
��2������馣������.һ�ȷ����ϴ�ϵͳ��³����ɢ���ƣ�J��.��������ߣ�vol 15.NO3,2000�ꪥ
��3�ݳ±�.һ��������ƽṹ����ϴ�ϵͳ��³�����ƣ�J��.����������Ӧ�ã�1998��15(2)��203-209��
��4������������÷������.���в�ƥ�以����������ϴ�ϵͳ�ķ�ɢ���Ƽ�������ٵ�LIM������J��.��������ߣ�2000��7�£�VOL15��N04��
��5�ݳ�������������л����������.ʱ�ʹ�ϵͳ��ɢ³�����ٿ�������ƣ�LMI������J��.��������ߣ�2001��1�£�VOL16��NO1��
��6���ҽ����������պ�ҵ.³���������ۼ���Ӧ�ã�M��.�㽭��ѧ�����磬2000
|
|
| ��Ѷ¼�룺admin ���α༭��admin |
|
|
��һƪ��Ѷ�� FDZ��12��630�ͻ�������Զ��ֶ��������Ƽ���ؼ�����
��һƪ��Ѷ�� ���õ�Ƭ�����������������·���������IJɼ�ԭ������ |
|
|
| �����壺С �����������������������ղ��������ߺ���������ӡ���������رմ����� |
|
�� ���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ��� ���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ��� |
|
|
|
|
|



