| 由机电之家行业门户网运行 |
|
|
|||||||
|
|
||||||
|
|
 |
|
| 您现在的位置: 设备维修与管理 >> 设备管理 >> 管理技术 >> 网络计划 >> 资讯正文 |
|
设 备 管 理 网 s b g l . j d z j . c o m
|
|
服务热线:0571-87774297 传真:0571-87774298 电子邮件:donemi@hz.cn 服务 QQ:66821730
机电之家(www.jdzj.com)旗下网站 杭州滨兴科技有限公司提供技术支持
|




 对其进行模拟。燃料到锅炉有效吸热量的动态环节用一个35s的一阶惯性加一个40s的纯迟延环节来模拟。
对其进行模拟。燃料到锅炉有效吸热量的动态环节用一个35s的一阶惯性加一个40s的纯迟延环节来模拟。




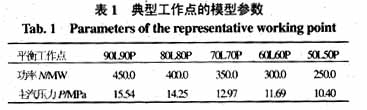 根据上述分析,本文选取如表1所示的5 个典型平衡工作点进行控制器设计。例如,90L90P代表机组90%负荷以及此负荷所对应的滑压值所组成的工作点。
根据上述分析,本文选取如表1所示的5 个典型平衡工作点进行控制器设计。例如,90L90P代表机组90%负荷以及此负荷所对应的滑压值所组成的工作点。






 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)