������1������ΰ1��������2��������1���ű���1
1���廪��ѧ���ϵ������100084����2�������ѧ�������ӹ���ϵ�����
1������
������Դ�˲�����Ϊ����г����Ⱦ�����Ƶ������������͵�������װ�ã��ڵ���ϵͳ�еõ�����㷺��Ӧ�á���Դ�˲����Ĺ���ԭ���������������ע��һ���븺���е�г��������ȫ��ͬ�ĵ����Ե��������е�г����������Դ�˲�����������������ߴ�г������̬������Ҫ����ʵ�����������ָ������кܸߵĸ�������������Դ�˲���������·�����ƶ������ȷ��������£�����������Ŀ��Ʒ���������Դ�˲������ܺ�Ч��������ҪӰ�졣
����������Դ�˲�����������Խϴ������õ������������İ�ȫ�Ժ�Ч��Ҫ��ϸߣ������Դ�˲����ĵ�������������ߵ������پ��ȵ�ͬʱ����Ӧ��������������Ŀ���Ƶ�ʺ㶨�����װ�õİ�ȫ�Բ�����ֱ�����ѹ�Լ�С����װ�õ���������ġ�
����ĿǰӦ������Դ�˲����ĵ������Ʒ���һ�������࣬���ͻ��������Ʒ��������Dz��������Ʒ�����1����ǰ�߾��Ƚϸ�����Ӧ�죬������Ƶ�ʿ��ܲ����ܴ����߿���Ƶ�ʺ㶨��װ�ð�ȫ�Խϸߣ�����Ӧ���������Ƚϵ͡�ͨ��������������ͻ����ȣ����ף�2�ݡ���5���еķ���Ӧ���ڵ������ʱʵ�����ͻ����ƵĶ�Ƶ����ͬʱ���������ͻ����ƾ��ȸߺ���Ӧ�ٶȿ���ŵ㣬���ף�6�ݽ�������ؿ���Ӧ������Դ�˲����������Ч�����ڶ�Ƶ���Ƶ����Dz��������Ʒ��������ַ�����ֱ����ѹ�����ʱȽϵͣ���������Դ�˲�������������ļ���ۡ������ڵ�ѹʸ���Ŀ��Ʒ�����7��10���нϸߵ�ֱ����ѹ�����ʺͿ��ƾ��ȣ����������ף�10���еķ������ж��ο���ѹʸ����������Ӷ�Ӧ�����ŵ�ѹʸ�����п��ƣ�ʹ�����ܽ�һ����ߣ���������Ŀ���Ƶ�����в�������ˣ��о�һ���ȱ��ֺ㶨�Ŀ���Ƶ�ʣ����нϸߵ�ֱ����ѹ�����ʵ��ͻ��������Ʒ�����ΪĿǰͬʱ�����Դ�˲������ܺ�Ч�ʵ����⡣
�������������һ�ֻ����Ż���ѹʸ���Ķ�Ƶ�ͻ����������·������÷������ص㣬һ���ܿ�����ȷ�ж��ο���ѹʸ�������Ӷ�ѡ���Ż���ѹʸ��ȥ���Ƶ��������ǿ�ѡ��������е������ʵ��Ŀ���ȥ����������Ӧ����������������������迹ֵ����ʵ�ֿ��ض�Ƶ�����ڴﵽ�ϸߵĿ��ƾ��ȡ���֤�ϸߵ������ѹ��ͬʱ����ʵ���˿��صĶ�Ƶ�����Ӷ�ʹ��Դ�˲������ۺ�������������ߡ�
2����Դ�˲��������ͻ��������Ʒ���
����һ���͵Ļ��ڵ�ѹԴ�������VSI������Դ�˲�����APF���Ļ�����ͼ��ͼ1��ʾ��ͼ�е�ָ����������·�������Դ�˲���Ӧ����IJ�������i��c���������ٿ��Ƶ�·����ݵ�ǰ��ʵ������IJ�������ic��ָ�����i��c֮�icȷ����Ч��С���ֵ�Ŀ���״̬����Ȼ�������ָ�������������ٿ��Ƶ�·�Ŀ��Ʒ������Ǿ���APF���ܵĹؼ����ڡ�
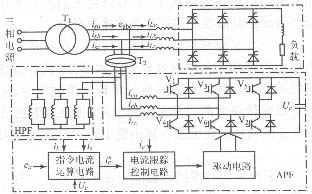
ͼ1����Դ�˲���ԭ��ͼ
2��1����Ƶ�ͻ���������
��1�����ඨƵ�ͻ���������
����ͼ2��a��Ϊ�����ѹԴ������ĵ�ֵ��·������������ѹΪu����Ԫ��R��L��һ��ѹԴe�����ӣ����������Ϊi����Ȼ��˲ʱֵ��·����Ϊ����
������ (1) (1)
������Ҫ�����������i����ij�ο���ָ�����i����������ֵ����������h���ٶ��������Ϊ�ο�����i��ʱ�����С���
���� (2) (2)
������ʽ��u��Ϊ��ο�����i����Ӧ��VSI�˵�ѹ���ɳ�Ϊ�ο���ѹ������һ��ѹ�£�����������������ȫ���ڲο�����i����ʽ��1����ʽ��2��������������
��������Ϊ��i��i��i������R��0�����С�����������

����E��E��2��u��max����Ϊֱ����ѹԴ��ѹֵ����Ӧ���ͻ�����������ͼ2��b����ʾ��

ͼ2�������ѹԴ����������ͻ���������
����ͼ3��a��Ϊ�����ͻ�������һ�����������ڵ�������ͼ���������������Ƶ�ʽϸߣ���һ�����������ڲο���ѹu���ɽ�����Ϊ���䣬��˸���ʽ��3���ɼ����������������ʱ��Tp���½�ʱ��Tn��һ����������T����ʱ�����¡�
������

ͼ3���������Ƶ����
��

(5)����6������7��
������ʽ��7���ɼ�������ͻ�����2h�̶�������u0��2u����E�IJ��ϱ仯������Ƶ�ʽ���֮�������������ͻ�����2h��ʹ8hL����E��1����u0��2�����ֶ����������ʽ��7����֪����������T��������Ƶ��f�������ֲ��䡣����Ƕ�Ƶ�ͻ����Ʒ����Ļ���˼����2����ͼ3��b����Ϊ�ñ��������������ͻ����ȵĶ�Ƶ�ͻ����ƿ�ͼ���������ź�s��һƵ�ʹ̶��ķ����źţ�ʱ���źţ���Ƚϣ��õ�����λ����������ֻ��ڵõ��������ͻ��Ƚ�������2h��ʵ���ϣ�����һ������8hL����E��1����u0��2���仯�ļջ����ƻ�·��
�����뵥��ϵͳ��ͬ����ͳ�������ͻ���������������ؿ��Ʋ�����������ţ���ÿ��Ŀ�����������������ص�Ӱ�죬����ֱ�Ӳ�������Ķ�Ƶ�����������ף�2�����������������֮������ŵķ�����ʹÿ��Ŀ��Ƶ�ͬ�ڵ����ͻ����ƣ��Ӷ���Ӧ�ö�Ƶ���Ƽ�����
��2������ϵͳ�еĶ�Ƶ�ͻ���������
����������Դ�˲����ɼ�ͼ4��ʾ�ĵ�ֵ��·�����е�ea��eb��ec�ȿ���Ϊϵͳ��ѹ���ٶ����������Ե�Եؾ�Ե������Ӧ��ϵͳ��·����Ϊ������

ͼ4�������ѹԴ�������ֵ��·
ʽ�С�u��i�ֱ�Ϊ�������a��b��c�����ѹʸ����ua��ub��uc��T�͵���ʸ����ia��ib��ic��T��eΪϵͳ��ѹʸ����1Ϊ����ֵ��Ϊ1�ĵ�λʸ����uNΪ���Ե�N�ĵ�ѹ��uN����ua��ub��uc����3����sa��sb��sc��3��2��E��3��u0������ο���ѹʸ��u��Ϊ����
 ��9�� ��9��
����
ʽ�С�i��Ϊ�ο�����ʸ����i��a��i��b��i��c��T��������������ʸ��Ϊ��i��i��i�� ����ʽ��8���ͣ�9��������ɵá�����
 ��10�� ��10��
������ʽ��10����֪������uN1�Ĵ��ڣ�ÿ��������ı仯���ʲ����뱾�������ѹ�йأ���ȡ������������������ѹ����˶�����ϵͳ��˵����ÿ��Ŀ�������T�Ͳο���ѹ֮�䲢��������ʽ��7�������Ĺ�ϵ������ͨ�������ͻ��������ȶ�����Ƶ�ʡ������ף�2������������������Ļ����Ͽ�Ӧ�ö�Ƶ�ͻ����Ƽ�����������
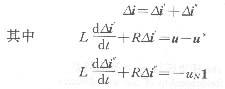 ��11������12������13��
��11������12������13��
�������ǵ�����������֮��Ϊ�㣬���Ц�i��a����i��b����i��c����i������ʽ��11���������ӿɵá���
����
��i����������i��a����i��b����i��c����3��14��
������ˣ��������i��������һ����Χ�ڣ���i���ͦ�iҲ���Զ�������һ����Χ�ڡ�����ʽ��12���ɿ���������û�У�uN1�����֮�以�����ţ�����ٶ�R��L����Գƣ������Ʀ�i��ʱ�ɲ��õ����ͻ������еı��������ʵ�ֶ�Ƶ��������uN�ɸ��������λ�ü���ó�����������ʽ��13����һ���Ի���ģ��R��L�迹�����ɼ������i����ֵ������i��ȥ��i���͵õ���i�������ף�2�ݾݴ�ʵ��������ϵͳ�еĶ�Ƶ�ͻ��������ƣ����ף�6�ݽ�һ������˼��Ӧ����������Դ�˲��������˷������迹����R��L��ֵ��ҪԤ�ȹ��ƣ�������Դ�˲���Ӧ���У�����ϵͳ�迹�仯��Ӱ�죬������Ħ�i���ض�����һ�������Ӷ�Ӱ������ƾ��Ȳ��ҽ�һ��Ӱ������������ܣ����Ǹ÷���Ӧ������Դ�˲���ʱ��һ���ϴ�ȱ�㣬��ˣ���������ķ������Դ���һ�Ľ���
2��2��abc����������任����ѹ�ռ�ʸ��
����Ϊ�˷����Ϳ��Ƶķ��㣬��������ϵͳ˲ʱֵ���ɶ��徲ֹ����任abc������������11����

����
��15��
����f��Ϊ˲ʱ��ѹ�����ʸ����
����������ռ�ʸ����

ʽ��fΪ��fa��fb��fc����Ӧ��˲ʱֵ�ռ�ʸ������ͼ5������ƿռ�ʸ�����ڦ���������Ϊһ������

ͼ5��abc����������������Ĺ�ϵ
��Ӧ��abc�����µĵ�·���̣�8���任���Ϊ
u��Ldi��dt��Ri��e��17��u0��Ldi0��Ri0��uN��18��
��������i0��0��u0������������������û��Ӱ�죬��ѹ�ռ�ʸ��u�͵����ռ�ʸ��i���ɵ�ʸ�����̣�17��������ȫ����������������潫�Կռ�ʸ�����۶���Դ�˲����ĵ������Ʒ������з�����
������Ӧ��ͬ�Ŀ���״̬ʸ����sa��sb��sc������ͼ4������Դ�˲����������ѹʸ��u����ua��ub��uc���ɱ�ʾΪ��Ӧ�Ŀռ��ѹʸ��u��
 ͼ6��u��n���Ŀռ�ֲ�
ͼ6��u��n���Ŀռ�ֲ�
��Ӧ�Ŀ���״̬ʸ����sa��sb��sc����ֵ��
��������������µ�������·������ʽ�뵥��ϵͳ��ͬ���������ѹ�������Ⱦ�Ϊ��Ӧʸ�������ﲻ���ظ���
2��3�������ɿ������Ż���ѹʸ��
�������ף�12��ָ�������ο���ѹʸ��u��λ��ͼ6�������γɵ��������ڲ�ʱ������u��n����u�������������ϵķ�����������ۦ�iλ��ʲô������ѡ���ʵ���u��n��ʹ��i��С����ˣ�ֻҪ��֤�ο���ѹʸ��u�����������ڲ�����i�ɿء���ͳ���ͻ����Ʒ��������ڿռ��ѹʸ�����ͻ����Ʒ����ĵ������������Ϊ��һ������������ͼ7���������Ρ�

ͼ7�������ɿ�����
�������ǣ���ʽ��12����֪���������Ķ�Ƶ�ͻ����Ʒ���Ҫ���ֶԦ�i�Ŀɿ��ԣ���������E��2����u��a��max��E��2����u��b��max��E��2����u��c��max����������ˣ���ɿ�����Ϊͼ7�е����������ڵ����������������ڵ������������ͬ�ij��������������Ķ�Ƶ�ͻ����Ʒ���ʱ��Ϊ��Ӧͬ����u������ֱ����ѹҪ�Ȳ��ô�ͳ�Ļ���ڵ�ѹʸ�����ͻ����Ʒ���ʱ�ߣ�����������������ġ�
����u��n��Χ�ɵ������οɽ�һ����Ϊ����С�����Σ���u�����ڵ�С�����ε����������Ӧ���ĸ�ʸ�����Ʀ�iʱ�������ܿ��Ƶ��������Ҿ��������9������ͼ6�е�u��������ʸ����ӦΪn����0��1��6��7����������ν���������ѹʸ������ͼ6�е�u��2����u��5������������ʸ�����Ʀ�iʱ���侫�Ƚ��������ŵ�ѹʸ����������u��3����u��4��ʱ����Ҫ�ߣ���Ϊ����ʸ����
���������������Ķ�Ƶ�ͻ����Ʒ������ڵ��Ʊȵ͵����⣬����ͳ�Ļ���ڿռ�ʸ�����ͻ����Ʒ������ڿ���Ƶ�ʲ��������⣬Ϊ�˽����һì�ܣ���һ�ڽ����һ�ֻ����Ż���ѹ�ռ�ʸ���Ķ�Ƶ�ͻ����Ʒ����������нϸߵĵ��Ʊȣ���ʵ���˿���Ƶ�ʵĺ㶨��
3�������Ż���ѹ�ռ�ʸ���Ķ�Ƶ�ͻ����Ʒ�������
��1�������Ż���ѹʸ���Ķ�Ƶ�ͻ�����
������ͼ4���Կ�������������iab��ia��ib��˵��ֻ��A���B������������״̬����仯��Ӱ�죬C���״̬�����أ���C�����iab���ͬ����A�����ibc���B�����ica���
������������ͬʱ�������λ����أ���������һ���λ���ʵ�ʱ������һ��ؾͿɿ�������������Ȼ��ֱ����ѹ�㹻���DZ�Ҫ�ģ������統u��ab��0ʱ����B��غ����±ۣ�sb��0���������A��B����ѹuab����sa��sb����E��saE ��������������Ϊ
����Ld��iab��dt��saE��u��ab��21��
�����ɼ�����ʱ����������iab�Ŀ����뵥���ͻ��������ƣ�����C��ĸ��ţ����ɶ�����A����ö�Ƶ���Ƽ�����
����ͬ������u��bc��0ʱ��B��غ����±۲���ʱ��C�����ɶ�������������ibc���䷽��Ϊ
�� ��Ld��ibc��dt����scE��u��ca��22��
������˵�u��ab��0��u��bc��0ʱ����B��ع̶���sb��0����ʱ��A���C��ɽ���طֱ����������iab��ibc����ʱ�뵥���ͻ��������졣��Ҫע����ǣ��������̣�21���ͣ�22��ʱ��ȫ����Ҫ����R��L��ֵ����ˣ����ַ�������Ҫ�����迹�����������ڹ������˷���ǰ������������ȱ�㡣
�����ӿռ�ʸ���Ƕȿ�����u��bc��0��u��ab��0ʱ��u��λ��������͢��У���ͼ8��a�����ɵ�2�ڷ�����֪����ѹʸ��u��1����u��0����u��5����u��6��λ��������͢��Ķ��㣬����ȫ����ס����������4����ѹʸ���Ĺ�ͬ���ӦB��غ����±� [1] [2] ��һҳ
|





 ���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ���
���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ���