|
|
设
备
管
理
网
s
b
g
l
.
j
d
z
j
.
c
o
m
|
 |
变结构控制器的摄动补偿器设计 |
|
|
| 变结构控制器的摄动补偿器设计 |
|
作者:佚名 文章来源:不详 点击数: 更新时间:2008-9-24 9:57:04  |
|
余家祥 欧志勇 程树昌
海军大连舰艇学院二系
1 引言
许多控制系统对参数的变化和负载的摄动都很敏感。而采用变控制理论,有可能在沿开关曲面滑动的相平面中得到状态轨迹,从而使系统对参数和摄动的响应保持恒定。然而在滑动状态,开关面附近的轨迹会引起系统的高频抖振。一个可行的补救办法是,用适当的连续开关规律取代间断的开关规律,从而使系统响应给定的精度范围之内。
本文给出的摄动补偿器可以减弱建模误差和抖振对系统输出的影响。文中提出了一个估算动态摄动信号的简单而又新颖的方法,所确定的鲁棒控制律能够保证控制系统在限定的时间内到达滑动状态。
2 摄动补偿
研究如下参数不确定且存在外部摄动的系统:

 显然,ΔU的作用是克服D(·)F(·)的影响。按照惯例,合适地选择ΔU的幅值可以使系统对摄动获得较好的鲁棒性。值得注意的是,控制律(2)间断地穿过滑动面,使控制信号产生抖振。本文研究目的,就是利用摄动补偿减弱不希望的抖振。
实际上,在任何系统中对摄动的直接测量是很困难的。有些文献中已经提出了一些估算或观测系统的摄动的方法。在这些方法中,没有一个是通过研究变结构系统的特点来达到这一目标的,而这正是本文的创新之处。
定理1:通过利用来自补偿器的控制信号U,可使摄动对式(1)动力学的影响消失。
显然,ΔU的作用是克服D(·)F(·)的影响。按照惯例,合适地选择ΔU的幅值可以使系统对摄动获得较好的鲁棒性。值得注意的是,控制律(2)间断地穿过滑动面,使控制信号产生抖振。本文研究目的,就是利用摄动补偿减弱不希望的抖振。
实际上,在任何系统中对摄动的直接测量是很困难的。有些文献中已经提出了一些估算或观测系统的摄动的方法。在这些方法中,没有一个是通过研究变结构系统的特点来达到这一目标的,而这正是本文的创新之处。
定理1:通过利用来自补偿器的控制信号U,可使摄动对式(1)动力学的影响消失。
 将式(5)表示的补偿器代入式(1),则从式(4)可得到动态摄动信号(6)。
3 变结构控制器
将补偿信号反馈到控制系统的输入端,使
将式(5)表示的补偿器代入式(1),则从式(4)可得到动态摄动信号(6)。
3 变结构控制器
将补偿信号反馈到控制系统的输入端,使
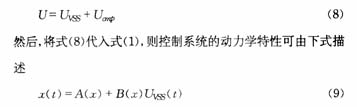 显然,式(9)与系统的摄动无关。
定理2:如果采用式(10)所示变结构控制律,则补偿后的系统(9)能够得到所期望的滑动状态
显然,式(9)与系统的摄动无关。
定理2:如果采用式(10)所示变结构控制律,则补偿后的系统(9)能够得到所期望的滑动状态

系统到达瞬态响应由下式确定
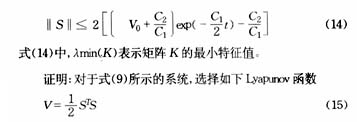
 它表示在限定的时间内,V=0,即S=0,另外根据式(16),到达瞬态响应由式(14)确定。通过将式(9)的右半边设定为零,可解得到达时间的上限tr,tr由式(12)给出。
从式(12)可以看出,tr最大值与e和λmin(K)成反比关系,适当地选择是:取小的e和大的λmin(K),以使其迅速到达瞬态,同时又可减小抖振。一个极端的情况是选取e等于零,到达瞬态将减弱得近似于滑动族,使控制律式(10)连续地穿过滑动面,从而不会呈现任何抖振。
4 结论
本文提出了一个估算系统摄动信号的简单方法,引入了正向补偿,减弱了不希望再现的抖振。该补偿器已经应用于某型舰炮模拟器的伺服系统中。结果表明,该方法具有较好的补偿效果。
参考文献
[1]林岩,等.低增益变结构模型参考自适应控制器设计[J].控制理论与应用,2001(6)
[2]于黎明,等.人机系统最优预见补偿跟踪控制研究[J].自动化学报,2001,(3)
[3]胡剑波,等.不匹配不确定性系统的近似变结构输出跟踪控制[J].控制与决策,2001,(1)
它表示在限定的时间内,V=0,即S=0,另外根据式(16),到达瞬态响应由式(14)确定。通过将式(9)的右半边设定为零,可解得到达时间的上限tr,tr由式(12)给出。
从式(12)可以看出,tr最大值与e和λmin(K)成反比关系,适当地选择是:取小的e和大的λmin(K),以使其迅速到达瞬态,同时又可减小抖振。一个极端的情况是选取e等于零,到达瞬态将减弱得近似于滑动族,使控制律式(10)连续地穿过滑动面,从而不会呈现任何抖振。
4 结论
本文提出了一个估算系统摄动信号的简单方法,引入了正向补偿,减弱了不希望再现的抖振。该补偿器已经应用于某型舰炮模拟器的伺服系统中。结果表明,该方法具有较好的补偿效果。
参考文献
[1]林岩,等.低增益变结构模型参考自适应控制器设计[J].控制理论与应用,2001(6)
[2]于黎明,等.人机系统最优预见补偿跟踪控制研究[J].自动化学报,2001,(3)
[3]胡剑波,等.不匹配不确定性系统的近似变结构输出跟踪控制[J].控制与决策,2001,(1)
|
|
| 资讯录入:admin 责任编辑:admin |
|
|
上一篇资讯: 配电电容器三相分相优化投切
下一篇资讯: 具有能量缓冲的统一潮流控制器及其控制的研究 |
|
|
| 【字体:小 大】【发表评论】【加入收藏】【告诉好友】【打印此文】【关闭窗口】 |
|
 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!) 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!) |
|
|
|
|
|



