冉旭1,廖培金2,陈平3,周志刚4
1.西安铁路运输职工大学,陕西省西安市710016;2.西安交通大学电气系,陕西省西安市710049;3.淄博科汇电气有限公司,山东省淄博市255031;4.郑州铁路局机务处,河南省郑州市450052
电气化铁道牵引供电系统是电力系统中具有一定独立性和特殊性的供电系统。其最大的特点是它的结构和负荷取流方式。和整个电力系统一样,电气化铁道牵引网故障的精确定位一直是影响电气化铁道安全及其可靠供电的重要因素,也是影响电气化铁道实际运能的因素之一。特别是对于我国正在兴起的高速电气化铁道,牵引网故障的精确定位对缩短抢修时间、提高运输效率将具有直接的影响。
目前,应用于电气化铁道的故障测距装置大多数是基于阻抗测距原理的单端测距装置。长期以来,虽经从事铁道供电工程的科研、技术人员多方面改进,但由于阻抗测距,特别是单端阻抗测距在原理上受过渡电阻的影响较大,因此要保证良好而稳定的测距精度将是十分困难的。
鉴于此,本文提出将行波故障测距方法应用于这一系统,以期得到电气化铁道牵引网精确、稳定的故障测距。
1 电气化铁道牵引供电系统基本结构及参数
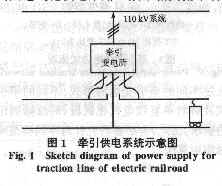
电气化铁道牵引供电系统是指从牵引变电所经馈电线到牵引网再到电力机车的工作系统,见图1(本文所有电气化铁道插图均引自文献[1][2])。
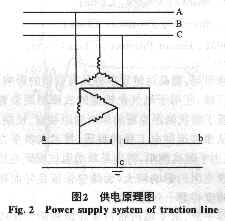
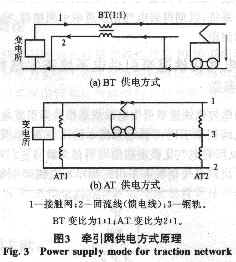
我国电气化铁道采用工频单相交流牵引制式。牵引变电所一般用于将三相110 kV的电能变换成27.5 kV(牵引网额定电压为25 kV)的电能并按单相分配给机车用户。根据牵引网不同供电方式的要求及牵引变电所为抑制单相牵引负荷造成电力系统的不对称影响,常采用不同接线方式与结构的主变压器,并以此将变电所区分为三相牵引变电所(一般用Y0/△-11变压器,二次侧△的C相接地,由A、B相向两侧供电,形成左右两侧供电臂。)、单相牵引变电所、三相两相牵引变电所(如Scott接线主变压器、平衡变压器等),供电原理如图2所示。而前面提到的“牵引网不同供电方式”一般可分为直接供电(direct feeding)、BT(booster transfor- mer)供电和AT(auto-transformer)供电方式,其结构如图3所示。
上述不同的牵引变电所形式、不同的牵引网供电方式及针对单复线电气化区段,对故障测距均有不同的要求。因此,有必要研究针对不同类型牵引网的故障测距算法。
2 电力牵引负荷的特点
从故障测距涉及的因素来考查电力牵引负荷的特点,会发现它有以下一些特点值得关注。
(1)一段牵引网一般只由1台变压器从单端供电,形成明显的线路首端和末端,并且没有分支;在线路的首端,可将变压器看成它的电源;
(2)单台机车功率相对于变电所容量较大,因此,机车的各种工况导致的负荷电流波动较大;电流的变化以突变(阶跃)居多;
(3)负荷峰、谷值相差悬殊;
(4)滑动取流的机车受电弓由于离线产生电弧及机车的频繁调级、投切(变压器空载),导致在系统中产生丰富的谐波(高次及分次);
(5)系统的回流(经回流轨、地或回流线)杂乱。
简便起见,下文中关于以上特点的引用将直接使用其序号。
3 各种测距方法在牵引网中应用的比较
按照故障测距原理,输电线故障测距一般可分为阻抗法、故障分析法和行波法。
3.1 阻抗法
阻抗法利用故障时测量到的工频电压和电流量来计算故障回路的阻抗值,是基于线路长度与阻抗值成正比的原理而求出观测点到故障点的距离。为叙述简单而又不失一般性,采用图4说明其测距原理。
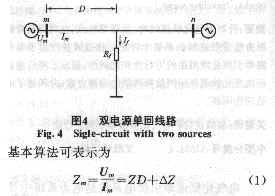
式中 Um、Im均为矢量,由装置安装点测量得到;Z为线路单位长度的阻抗;D为故障点到装置安装点的距离;ΔZ为测距误差,其性质由系统有关参数及过渡电阻Rf确定。
阻抗法的应用较广泛,随着计算机的应用,不论是采用单端法还是双端法,在准确度和可靠性方面都有较大的提高,并涌现出了许多有针对性的算法,在此不再赘述。
目前,电气化铁道牵引网故障测距装置多是基于这一原理的。由上文的特点(1)可知,牵引网一般处于单端电源供电状态,在供电臂故障时,只能用单端电气量测距。因此它不可避免地要受到过渡阻抗的影响。另外,一个比较关键的问题是对于富含高次及分次谐波的电气化铁道牵引网,傅里叶算法在处理大量分次谐波及非周期分量时比较困难,因此准确获得工频电压、电流值也将是困难的。这对基于工频量的测距法都是一个挑战。
正是由于上述牵引网的结构、负荷的特点及阻抗测距原理本身的原因,一些围绕阻抗法所做的修正方法或者关于消除谐波及过渡阻抗影响的算法当应用于牵引网故障测距时,都难以得到稳定、精确的测距效果。牵引网故障测距的多年应用实践也证实了这一方法在精度及稳定性方面存在着诸多不足。
3.2 故障分析法[3]
在系统运行方式已确定和线路参数已知的条件下,输电线路发生故障时,装置处的电压和电流是故障点距离的函数。该法就是利用故障时记录下来的电压、电流值对故障进行分析计算,实时求出测量点到故障点的距离。仍用图4来叙述它应用于单端测距的基本方法。
(1)基本关系式

故障分析法与阻抗法的区别在于它不以测量阻抗或电抗为基础。从上式还可看出,测距结果D也不受过渡电阻的影响,因此使得这一方法有较广泛的适应性。研究表明,该方法在一般输电线的故障测距中将是一种有前途的方法。将其应用于电气化铁道牵引网的故障测距也将明显优于阻抗法。首先,D的值不受过渡电阻影响,这一点是很可贵的;其次,对单端电源的牵引网,电流分布系数CM的取值为1,这便得D的计算简单而精确。
但不足的是,故障分析法与阻抗法一样仍然需要使用工频的电压、电流量;同时,随着机车受电弓滑动取流造成的导线逐步磨耗及部分区段的换线、频繁的人工检修、复线区段由于邻线状况的不确定性等因素造成的线路单位阻抗Z的不稳定性,使得故障分析法在应用于这一领域时受到极大的干扰和限制。另外在提取实时故障分量电流I*mg时,上文特点(2)所述的大量跃变电流也将对测距稳定性造成不可低估的影响。因此,利用工频量的故障分析法也难以适用于电铁牵引网的故障测距。
3.3 行波法
行波法是根据行波传输理论实现对输电线故障测距的方法。由于行波在线路中有比较稳定的传播速度,且测量到的时间差不受线路类型、故障电阻及系统运行参数等影响,因而,行波法故障测距有较好的精度和稳定性。
早期利用行波的测距装置可分为A、B、C型3种。A型装置利用故障点产生的行波在测量点到故障点间来回往返的时间与行波波速之积来确定故障位置;B型装置利用故障点产生的行波到达两端的时间差与波速之积来确定故障位置;C型装置是在故障发生时于线路的一端施加高压高频或直流脉冲信号,根据脉冲往返时间来确定故障位置。
这3种方法中,A型、C型为单端测距;B型为双端测距,需要有两端通信。A型和B型装置对输电线路的瞬时性和永久性故障均有较好的适应性,C型装置则可在线路断开的条件下检测出故障,因此多用于永久性故障定位[3]。
现代行波法中,基于全球定位系统(GlobalPosi-tioning System,GPS)精确对时的双端行波法的D型装置(原理同B型)使得行波故障测距的实现既简单又精确稳定,并且有良好的适应性。由B型装置的测距算法[3]

可看到,由GPS精确获得tT、tQ、tC是可能的,而行波速度ν一般是稳定的,因此由D型装置获得的DnF也将是精确而稳定的。
将行波法应用于电气化铁道牵引网的故障测距,行波信号可直接通过电压互感器、电流互感器获取[4],其测距精度和稳定性不受过渡电阻及上述牵引负荷特点(2)(3)(4)等造成的影响。这将有可能消除牵引网测距中的多种偶然误差,真正得到牵引网故障定位稳定而精确的结论。
3.4 小结
比较阻抗法、故障分析法及行波法在电气化铁道牵引网中故障测距的适应性,笔者发现前两种方法固然有它的优点,但随着输电线行波传输理论研究的深入及电子技术、计算机技术的发展和相关技术[5,6]的引入,现代行波法将更胜一筹,其应用前景将更加广泛。
现代行波法已在信号的传变、提取、识别、处理等技术方面取得了长足进步。本文提出将行波法应用于电气化铁道牵引网故障测距也是结合现有技术水平和以上比较而得出的。
4 行波法应用于牵引网故障测距的方案
在第3.3节所述的各种行波测距装置中,由于C型装置要附加高压高频脉冲信号发生器等部件,因而比较复杂和昂贵,故在此暂不作考虑。以下仅研究A型、D型装置的适应性问题。
4.1 故障时牵引网中的行波信号
A型、D型装置均利用故障点产生的行波信号。
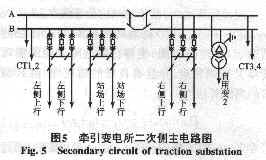
由图1、2可见,牵引变电所向两侧牵引网(供电臂)供电,其二次母线连接设备主要有主变压器、馈电线(出线)、单相PT、单相CT及所内自用变压器等,如图5所示。任一出线在母线处均与主变压器、自用变压器和至少另外一条出线相连,因此,故障产生的行波在母线处均应有良好的反射[3]。
另外,牵引变电所27.5 kV母线侧所使用的电磁式电流互感器和电压互感器为行波信号的获取提供了有利的条件。目前的牵引负荷回流由以前的轨地回流改为由专用回流线回流,也使得行波的传播速度更加稳定[7]。
4.2 A型、D型装置的适用性
实际上,不论A型还是D型装置,都适用于牵引网故障测距。但是,单端测距的A型装置,由于要不断的提取、识别入射波和反射波等,并对其性质做出准确的判断,因此,它的实施将存在着一定的困难。特别是在牵引网上存在多台移动的机车负荷时,准确获取故障点反射波或透射波等的性质将更繁杂。但是,基于双端原理的D型装置由于只要获取故障点向两端传播的波头信号,实施较为简单,并且不受线路及机车状况的影响。因此,采用D型装置将更能适应电气化铁道牵引网精确故障定位的需要。
比较A型、D型装置的特点并结合现有电气化铁道独立的供电、通信等设备状况及现有的技术,本文提出采用D型行波测距装置将是可行的、有效的。
4.3 采用D型装置的具体实施方案
由于D型装置只需要利用故障点向两端传播的第一个行波波头信号,因此不需要进行行波性质的识别,甚至不需要高速A/D变换等设备。所以,在实施中主要考虑以下几点:
(1)在行波信号的获取方面,由于牵引网供电臂的单端电源的特殊性,可考虑在供电臂的首端(牵引变电所)和末端(分区亭)采集电压行波信号(可设计专门记录电压行波波头信号的装置)。
(2)在供电臂的首端(牵引变电所)和末端(分区亭)各设1台装置,并兼顾其两侧。
(3)申请或设置专用的沿线(铁道)通信通道。(4)在行波启动限值上让装置做自适应处理等。
以上几点仅是针对牵引网特点用D型装置进行精确故障测距时较重要的几个方面。值得注意的是,不论是对装置还是线路或者负荷等特性的细小的疏忽,都有可能导致装置的失灵。因此,具体的实施仍要有针对性地注意一些次要的环节。
4.4 方案及其抗干扰问题
由于D型测距方案只利用故障产生的第一个行波波头信号,不涉及对反射波、透射波的分析、识别等问题,因此,在确认是故障行波波头到达时即启动测距装置,并按记录的时间采用式(4)给出故障点位置。该装置的两端通信可采用沿铁道敷设的专用通信电(光)缆,噪音很小,并且一般与牵引网等长。另外由于应用GPS,公式(4)中时间量的精度较高,而且波速ν稳定而不受其它因素的影响等都为本方案的实施提供了有力的保证。
这一方案的实施是简单的,但它仍然有值得关注的干扰问题。比如对机车断路器产生行波的区别、BT方式下吸流变对行波波头的削弱、站场接触网结构对行波信号的影响等。关于这些问题的解决方案将在其它文章中进一步论述。
5 结语
输电线的行波故障测距方案在现有技术的支持下,其原理的优越性已逐渐显现出来。随着人们对行波认识的深入,行波故障测距装置的投入成本已降到了相当低的水平,并随着这一方法的不断完善,它将与其它方法一样在电力系统获得推广。但是,将这一技术应用于电气化铁道牵引网还是一个新的课题,也是该技术应重新面对的一个新领域。当然,这一应用的重点应该是行波故障测距对牵引网的适应性问题。
本文认为,行波法应该是电气化铁道牵引网精确故障定位的一种比较理想的方法。
参考文献:
[1] 贺威俊,简克良.电气化铁道供变电工程[M].北京:中国铁道出版社,1980.
[2] 曹建猷.电气化铁道供电系统[M].北京:中国铁道出版社,1981.
[3] 葛耀中.新型继电保护与故障测距原理与技术[M].西安:西安交通大学出版社,1996.
[4] 徐丙垠.利用暂态行波的输电线路故障测距技术[D].西安:西安交通大学电气工程系,1991.
[5] Lee H,Mousa A M.GPStraveling wave fault locator systems:investigation into the anomalous measurements related to light-ning strikes[J].IEEE Trans on Power Delivery,1996,11(3):1214-1223.
[6] 董新洲,葛耀中,徐丙垠,等.新型输电线路故障测距装置的研制[J].电网技术,1998,22(1):17-21.
[7] Bo ZQ,Weller G,Bedfern M A.Accurate fault location technique for distri- bution system using fault-generated high-frequency transient voltage signals[J].IEEProc Gener Transm Distrib,1999,146(1).
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)