束洪春1,司大军1,葛耀中2,陈学允3
1.昆明理工大学电力工程学院,云南省昆明市650051;2.西安交通大学,陕西省西安市710049;3.哈尔滨工业大学,黑龙江省哈尔滨市150001
1 引言
近20年来,输电线路故障测距问题的研究在国内外异常活跃,许多学者基于对线路模型、测量电量以及测量手段的不同考虑,提出了多种测距算法,如光纤测距法、行波测距法[1,2]以及基于计算机的数字式测距法。其中基于电流行波的双端测距法和光纤测距法的硬件设备造价高,在我国的实用条件还不成熟。而计算机测距算法是基于对电流电压的采样,利用计算机强大计算能力获得测距结果,这类方法具有现实意义,该方法能够直接运用于电力系统现有的微机自动化装置上,如微机距离保护、微机故障录波装置和微机监控等。计算机测距算法主要分为2种:时域法[3-5]和频域法[6,7]。频域法往往采用1个或几个周波内的平均工频信号,但是在现代高压输电系统中,从故障开始到断路器动作的时间越来越短,获得平均工频信号会遇到困难,且频域法还须用数字滤波器来获取平均工频信号。另外,考虑电弧的线路故障测距应用技术亦较少。此外,输电线路2端往往分属于2个电业部门,在故障测距应用研究中由于管理体制限制了双端法故障测距技术的应用,因此,研究准确的故障测距单端新方法仍十分必要。
本文以漫湾-昆明500kV线路为背景开发了时域算法的故障测距应用软件。
2 传统单端时域测距方法面临的困难
对于图1(a)所示的故障线路,故障分量图如图1(b),由克希荷夫定律得
uf(t)=uM(t)-xf・R・iM(t)-xf・L(diM(t)/dt) (1a)
if1(t)=iM(t) (1b)
(l-xf)(L+LN)(dif2(t)/dt)+(l-xf)(R+RN)if2(t)=-uf(t) (2)
式中 xf为故障距离;R和L分别为每公里电阻和电感。

if(t)=if1+if2(t)(3) 式(3)为一微分方程,解此方程需if2(0)的值,此值为0。但在故障初期,故障后电压电流中有大量的谐波存在(如图2所示),若用这些值求解式(3),将带来不能容许的误差,仿真表明,此时测距误差很大。因此测距所需的电压电流应避开故障初期的大量谐波,使用故障后变化较为平缓的数据,即uM(t)、iM(t)需从某一不为0的时刻t1开始,式(3)的初始条件为if2(t1),此值仍然不易获得(因为受采样频率的限制,用式(2)以差分代替导数数值求解if2(t1)误差很大),也就无从获得if(t),给故障定位带来了很大的困难。

在超高压、高压输电系统中,线路及系统的电抗远远大于电阻,电抗起着决定性作用,图1所示的故障线路中,if1(t)与if2(t)的相位必然相近(如图3),即if2(t)/if1(t)≈K,K为一常数。大量仿真实例表明,K为常数的假设对本文故障测距算法的定位精度影响不大。

3 单端故障测距时域新方法
文中约定:下标“F”表示故障之后的电气量,下标“P”表示故障之前的电气量,无此二下标表示故障分量。
3.1 电弧等效模型
高压输电线路单相接地故障多为电弧故障,此类研究报道目前较少。实际中,电弧是很复杂的,它受到电弧所经路径、电弧几何形状、电弧冷却速度等因素的影响[8]。其电压为近似方波长电弧波形如图4~6。对于故障定位而言,最关注电弧的电特性,观察图4~图6建立近似电弧转移特性如图7(b),其电路等效模型如图7(c)所示。图5中的AB、BC和CD段分别近似为图7(a)中的AB、BC和CD段。



式中 v,i分别代表电压和电流。将相互独立的三个模具0αβ模仍记为012模。将式(1)改写为

式中 △t为采样间隔。
R2。
3.2 A-G故障定位算法推导
本文使用相模变换技术,其电压电流相模变换矩阵选用0αβ相模变换关系
 理论上,有5个点即可确定故障位置xf,但考虑到减小偶然误差对测距精度的影响,借鉴最小二乘法的思路,应增加点数,求取多个R′f,并以各个R′f的均方差Er最小为目标建立故障测距算法求解xf。
理论上,有5个点即可确定故障位置xf,但考虑到减小偶然误差对测距精度的影响,借鉴最小二乘法的思路,应增加点数,求取多个R′f,并以各个R′f的均方差Er最小为目标建立故障测距算法求解xf。

用搜索法以步长h在线路全长0~l上逐点求解Er,使Er最小的点即作为故障点xf的解答。图8为A-G故障求解过程,iTH为一门槛电流,可取为M端A相电流幅值的1/3即可保证位于图7(b)的AB段或CD段,以期避免解算中所用到的采样值对应于电弧转移特性的BC段,N为求取R′f,j的个数。

3.3 BC故障定位
BC故障定位与A-G故障定位相似,将式(8)~式(11)改写为式(13)~式(16)


求取多个R′f,以各个R′f的均方差最小为目标求解xf。同理,亦可方便地推出BC-G型、ABC-G型和ABC型故障类型的求解表达式。
4 暂态仿真
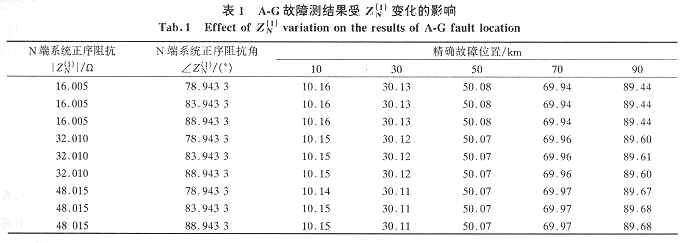
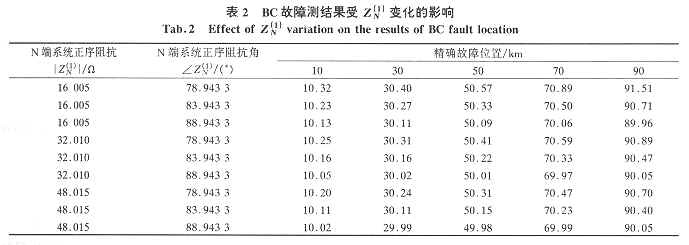
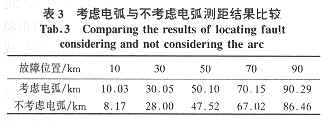
故障网络如图9所示,线路长度100 km,采样频率10 kHz。以分布线路参数对其进行故障测距暂态仿真的结果如图10,既要避开高次谐波的时段同时又亦应考虑断路器的较快动作,测距所用数据从故障后半个周波开始取数,共用9个采样点计算5个R′f,j,使其Er最小来求取xf的值。本算法中不需输入对端系统等值阻抗,为了检验对端系统阻抗发生变化时对该测距算法定位精度的影响,电磁暂态仿真中有意变化对端系统正序阻抗Z(1)N的值,其故障测距暂态仿真结果如表1、2所示。同时为了说明建立故障测距单端算法时应当考虑电弧因素,以A-G故障为例说明了考虑电弧与不考虑电弧对测距的影响,其结果见表4。从表4中可以明显地看出不考虑电弧会对电弧故障测距有很大的影响。

5 应用实现
图11为测距结果显示。此程序可提供录波数据波形及故障前后的电压电流进行向量分析。还建立了线路参数数据库,可方便地保存、添加、删除、修改线路参数,以供用户方便使用。
6 结论
(1)本算法是在一般的时域网络基础上实现的,其电路关系对任何频率的分量都成立,无需滤波环节,直接利用采样值进行测距;
(2)本算法最少需要5个采样点即可估算出故障距离,但为减小偶然误差对测距精度的影响,适当增加采样点数,使用最小二乘的方法获得故障距离,提高了测距的精度和可靠度;而且所用时窗远远小于半个周波,而频域法至少需用半个周波;
(3)本算法既可对电弧性故障亦可对非电弧性故障进行定位;理论上不受过渡电阻的影响;
(4)本算法不需输入对端系统阻抗参数,因此理论上可将对端系统阻抗随运行方式变化对故障定位的影响程度减小到最低。
&nb[1] [2] 下一页
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)