|
摘 要:电力系统相量(包括电流、电压等)的同步采样对于电力系统继电保护、故障判断、系统稳定分析等都具有重要意义,其中如何获得同步脉冲也就是说如何实现同步采样一直是个关键问题。本文例举了几种同步实现方法:主站广播对时法,基于通信信道的采样时间补偿法以及卫星授时法等,最后指出利用GPS卫星授时与锁相技术相结合的方法是一种切实可行的方法。
关键词:电力系统;同步采样;全球定位系统(GPS)
0 引言
目前电力系统中各种测控与保护装置普遍要求交流数据量的同步采样,这对于电力系统继电保护、故障判断、系统稳定分析等都具有重要意义。一般,采样脉冲都是在装置内部时钟的控制下产生的。对于需要异地同步采样的装置来说,由于装置内部晶振频率有误差,采样难以同步。而且随着电力系统的发展,对系统监控的要求越来越高,迫切要求能够实现交流数据量的异地同步采样。所以,早先在国外运用了一种无线电波广播对时的方法,还有一种方法是基于通信信道的采样时间补偿法来实现同步采样。但是这两种方法都有自身所不可克服的弱点。随着卫星与通信技术的发展,卫星授时法已经由军用逐渐转为民用。其中基于全球定位系统(GPS)的同步采样方法已经得到了广泛的应用,并获得了良好的效果。本文提出的GPS与锁相技术相结合的方法,不但能够保证异地同步采样,而且还能够在系统频率变化情况下,较好地实现其交流量的同步采样,并能保证全网的同步测量。
1 主站广播对时法
为实现同步采样,主站在同一时刻给系统中所有的测控装置一个同步时钟脉冲。按照传输的媒介不同,主站广播对时法可以有以下三种形式:AM调幅广播、微波传输系统和光纤传输系统[1]。
1.1 AM调幅广播
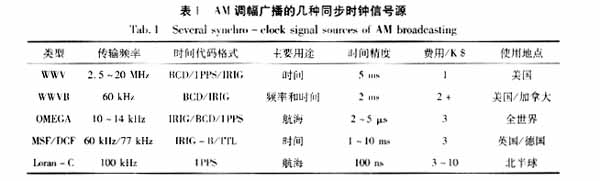
AM调幅广播主要有五种调幅方法:WWV、WWVB、OMEGA、MSF/DCF、Loran-C等。它们的调幅频率、时间代码格式、主要用途、时间精度、费用以及使用地点都不一样,表1作了详细的比较。
在北美最普遍的广播方式是WWV,与之配套的商用接收器和同步系统都已经比较成型。如果信号传输延时时间恒定或者这一时间可以预测,那么这套系统就可以达到±100μs的精度[2]。但是这个假设很难成立,所以在实际运行中只能达到几毫秒的精度。
WWVB(美国科罗拉多州的Fort Collins)广播是一种连续的时间基准信息通过60kHz的载波信号传输的方式。这种方式的主要优点是信号传输延时时间相对比较恒定而且可以事先预测。从理论上讲时间精度可以达到±50μs,但是由于信号受噪声和幅度波动的影响,它的精度也只能达到几毫秒[2]。
OMEGA使用的是很低的传输频率,一般是10-14kHz,它的信号遍布全球范围。由于它使用的是最长的无线电波而使信号可以传输几千公里且传输时间误差只有几微秒。美国海军电子实验室(USNEL)和美国海军研究所(USNRL)已经通过实验证明了无论通过什么路径传输,其延时时间预测精度可以达到2至5μs[3]。
MSF是英国国家物理实验所为了使本国的时间和UTC(Universal Time Coordinated)时间保持一致而建立的广播系统,由英国电信以60kHz的频率向全国范围内发送英国标准时间。而DCF是由德国建立的,它的目的也是向全国范围内发送德国标准时间,发送频率是77kHz。
Loran-C传输的是脉冲信号,而且只通过地波传播信号[1]。因此它很好的解决了WWV、WWVB等方式由于信号可以从地波传播也可以从天空电波传播而使得传输延时无法确定的问题。它的时间由原子钟控制,精度最高可以达到100ns[4]。另外Loran-C信号还能产生1PPS秒脉冲信号,并以UTC时间为基准。但是由于它本身固有的频率为100kHz,这就注定它很容易受到同频率的载波信号的干扰,使得其性能受到很大影响。
1.2 微波传输系统
在很多应用场合,希望通过微波从含有基准频率和时钟源的主站向需要同步的远方子站传送时间信号。除非传输过程中有特殊装置,这种微波传输系统的最高时间精度也只能达到1μs。它有两种形式:模拟微波和数字微波。模拟微波传输系统是直接通过对连续波的移相调制,使用最好的微波设备才能获得1μs精度。而数字微波传输系统更是由于数据打包延时和数据包传送延时使得其精度只能达到70μs[2]。
1.3 光纤传输系统
光纤传输系统和微波传输系统很相似,只是它是通过光纤来传送同步时间信号的。微波传输系统由于单边传输和导频锁相而使信号失真和抖动,光纤传输系统很好地解决了这些问题,因而输出信号更稳定更可靠,同步精度可以达到0.5μs[2]。
由此可见,AM调幅广播的几种方法在时间精度上普遍都比较低,而且只适用于局部地区,而微波传输系统的精度也不高,至于光纤传输系统虽精度高,但需花巨大成本建设光纤系统。因此,这些方法都不是最佳选择。
2 基于通信信道的采样时间补偿法
电力系统为了使两个或多个变电站之间保持时间同步,可以从一个站(主站)向另外一个站(子站)发送一个时间信号。这个信号包含同步时间基准信号和启动采样的信号等信息。传输过程中产生了一个延时时间。为了消除这个延时时间,也就是使子站的采样时间基准与时间信号传输延时无关,就必须在两个变电站的采样时间基准之间进行补偿。总体上基于通信信道的采样时间补偿法必须执行以下四个步骤:
(1)发送一个带同步时间基准的脉冲信号。
(2)收回这个信号,测量传输延时间。
(3)将传输延时时间传给子站。
(4)对子站进行时间补偿。

脉冲,假设主站和子站都是同频率等间隔采样。在开始同步采样以前,由主站向子站发送一帧计算信号传输延时时间td的命令信息,子站收到后将命令码和子站处理延时时间tm一起传送回主站。假设从主站到子站的延时时间td1与子站到主站的延时时间td2相等,tr1为主站收回信号的时刻,那么就可以计算出传输延时时间:

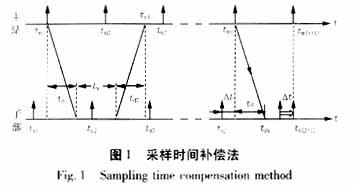
假设主站在tmi时刻将包含传输延时时间td和进行采样时间补偿的命令信息发给子站,子站收到信息的时刻是trk,那么就可以计算出子站与主站之间采样脉冲的时间差:

如果△t>0,表示子站采样超前主站;如果△t<0,表示子站采样置后主站。于是我们可以对子站的下一采样脉冲进行调整,其采样时刻为ts(j+1)=(tsj+T)-△t,,从而实现了同步采样。
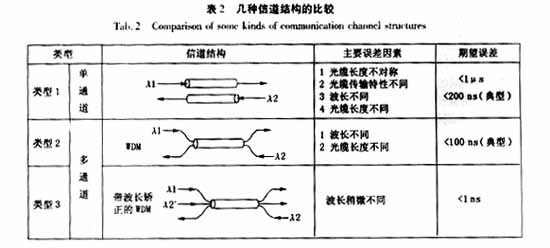
在这里,我们假设的是在信号传输过程中,同一线路不同方向的传输延时时间相等,但是实际上是不可能的,而且随着通信信道结构的不同而有差异。表2列出了几种信道结构的组成、影响不同方向传输延时时间差的主要误差因素和期望误差[6]。类型1利用了两条光缆,如果两条光缆安装在同一套管里,那么在传输2500km时绝对时间误差小于200ns [7]。这个误差主要是由光缆长度不对称、传输特性不同和波长不同等原因引起。类型2和类型3利用了波长分隔多路复用(Wavelength Division Multiplex,WDM)技术,因此共用单条光缆克服了光缆长度不对称这一主要误差因素。类型2的传输延时时间差主要由波长不同引起,利用波长分别为1.3μm和1.5μm传输40km时绝对时间误差小于100ns [8]。类型3采用了传输延时矫正的方法,因此绝对时间误差可以小于1ns [8]。
基于通信信道的采样时间补偿法已经在现场中得到了应用,如南瑞公司的LFP-931A型光纤电流差动保护中。但是这种方法太依赖于通信信道,如果在代码传输过程中出现错误或者是通信信道中断,都将造成不良后果。另一方面还要花巨资建设通信信道,购买通信终端设备。
3 卫星授时法
在IEEE Std 1344-1995中对同步时钟源提出了要求[1]:“同步时钟信号必须在任何测量装置所在位置保持不间断,可靠性要高于99.87%(每月间断时间小于1小时),同步时钟信号必须使同步采样装置和UTC时钟保持精度在1μs的同步范围内。”按照这个标准,前面叙述的两种同步方法似乎很难满足要求,因此人们利用了高精度高可靠性的卫星授时法来实现电力系统的同步采样。可以采用的同步卫星系统有两种:GOES(Geostationary Operational Environmental Satellite)卫星和GPS(Global Position System)卫星。
GOES卫星的主要任务是进行气象预测,特别是预测西半球的龙卷风,其次才是同步时间传送。如果GOES接收器所在位置已经预先编程,那么接收器从时间信号中解码得出的时间与UTC标准时间的误差可以控制在25μs之内。由于这一系统只有两颗卫星,任一卫星故障都会使一些地方接收不到信号。接收天线使用碟形卫星天线,如果卫星移动,天线就必须跟着作调整。另外,GOES卫星使用的是468 MHz的频率,它会受到地面的移动通信系统和日食的干扰。鉴于这些原因,这一系统也没有得到广泛的应用。
GPS卫星是由美国国防部历时20多年建成的无线电导航系统,一共由24颗卫星组成,其时钟由铯原子钟控制,并向全世界发布标准UTC时间,精度相当高。它的基本精度是0.2μs,如果通过高级解码和处理技术这一精度还可以提高,一般情况下0.5μs是可信的[1]。GPS的初衷是用于军事领域,而若将它应用在电力系统或其它非军事领域,势必产生一些问题:如军用与民用时间精度要求不一样和费用等。因此美国运输部和国防部联合制定了联邦无线电导航计划(FRP),计划中承诺:在任何情况下,GPS将无偿对民用开放至少10年,除非国家处于紧急状态,并且保证在92%的时间内精度不低于0.5μs,在99.9%的时间内精度不低于1.1μs,这个计划每两年更新一次[9]。这个精度已经能够满足IEEE Std 1344-1995中提出的要求,1μs对于50Hz的电网相当于0.018°的电角度,也能够很好地满足同步采样的要求。
4 基于GPS与锁相技术相结合的方法
GPS已经解决了不同地点由于启动采样时脉冲的不同步问题。但是如果采样频率保持恒定,而系统频率发生偏移时,将使采样结果产生误差。因为目前电力系统数据采样应用最多的数字处理算法是利用离散傅立叶变换(Discrete Fourier Transform,DFT)来计算其频谱,即:

由DFT的导出过程可知, DFT实际上是对采样信号进行周期延拓,在离散时间周期信号的傅立叶变换后取其频域的一个周期。这就要求采样信号和系统信号严格保持同步,即采样频率是系统信号频率的整数倍,否则将出现频谱泄漏,使信号DFT的计算结果产生误差。为了使采样频率能够跟踪系统信号频率的变化,我们引入了锁相环(PLL, phase locked loop)电路[10],它其实是一个反馈控制系统,如图2所示。图中,为系统信号基频,为采样频率。
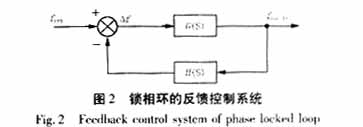
考虑系统信号频率是渐变的,设fsys=at1(t),则其拉氏变换为fsys(S)=a/S2。而由图2得反馈控制系统的误差函数为:
兼顾系统稳定性取n=2,并取反馈传递函数H(S)=1/N(N为采样分频系数),则fsample就可以实时跟踪系统频率信号的变化进行采样。
在此理论基础上,我们提出了利用GPS与锁相技术相结合来实现采样频率自动跟踪被测系统频率变化的自适应等间隔采样,其原理如图3所示。GPS接收器采用GSU-25,它可输出1PPS、10kHz两种脉冲和UTC时间信息。预处理电路是将互感器二次侧信号进行隔离放大后得到的三相交流信号va、vb、vc叠加成一个复合模拟信号vf=(k1va+k2vb-k3vc),保证锁相环工作正常。此信号再经隔直带通滤波器滤除直流成分和谐波分量,最后经整形后输出f1。PLL是锁相环电路,它首先对输入信号进行N倍频并以其作为基准脉冲,然后按照每周波采样点数对这一基准脉冲Nf1进行计数,计数器计数到设定值后获得一脉冲fsample,由此启动采样。例如每周波采样12点时,我们可以取N为7200f1,并对7200进行计数,设置计数器2当计数到600时产生一个脉冲,这个脉冲就是等间隔采样脉冲fsample。由于f1信号是随系统变化而变化的,以Nf1作为基准获得的采样脉冲也必随系统变化而变化,从而实现采样频率自动跟踪系统频率变化的自适应采样。
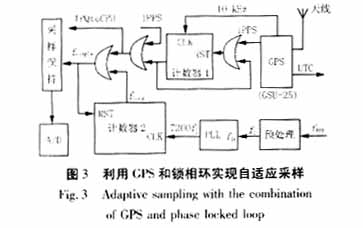
图中的采样脉冲实际上来源于三个部分:(1)来自GPS的秒脉冲1PPS同步校时信号p1,实现全网同步采样;(2)基于GPS之10kHz脉冲信号经计数器1计数得到的周期同步采样脉冲信号p2,实现周期数据窗的同步采样;(3)基于锁相环输出的基准脉冲经计数器2计数得到的脉冲信号p3,实现周期数据窗内等间隔采样。上述三个采样脉冲在同一时刻只有一个发生作用,且p1、p2两个脉冲中任一个有效时都会申请CPU中断,通知CPU记录整秒采样或周期数据窗采样开始时刻。这样,p1、p2和p3经过与门组合后就获得了我们所要的采样脉冲fsample。
基于上述硬件电路进行异地同步采样的启动过程如下:首先进行初始化和接受GPS校时,且在此期间所有的A/D转换结果都视为无效,只有在初始化结束并经GPS可靠校时后第一个GPS的1PPS秒脉冲到达后,CPU才会开放A/D中断,并将该1PPS秒脉冲所对应的A/D转换数据作为第一个有效采样数据,从而保证了全网数据采样的同步启动。
随着微电子及通讯技术的迅猛发展,目前GPS接收器的价格已经降到了广大用户所能接受的范围内。同时由于其体积小,性能稳定可靠,可以直接集成在测控装置中,而且只要配置适当的接收天线,不再需要别的设备和通道,因此它比广播对时法和基于通信信道的采样时间补偿法更具优势,从而得到了广泛的应用。
5 结论
通过对电力系统各种数据采样同步方式的比较,得出利用GPS与锁相技术相结合,不但解决了全网大范围内的同步采样问题,而且还保证了在系统频率漂移情况下,实现采样频率跟踪系统频率的自适应采样。我们已经将这一技术应用于功角测量单元PMU(Phasor Measurement Unit)和馈线终端单元FTU(Feeder Terminal Unit)中,并取得了预期的效果。这就为电力系统继电保护、故障判断、系统稳定分析等提供了重要的数据;同时采样得到的数据通过通信网络上传给远方调度中心后,还可为调度中心的正确决策提供可靠依据。
参考文献
1. IEEE Standard for Synchrophasors for Power Systems,IEEE Std 1344-1995
2. A. G. Phadke, B. Pickett,etc.Synchronized Sampling and Phasor Measurements for Relaying and Control. Power Delivery, IEEE Transactions on , Volume: 9 Issue: 1 , Jan. 1994 Page(s): 442 -452
3. J. A. Pierce. Omega. IEEE Aerospace and Electronics Systems Magazine , Volume: 4 Issue: 7 , July 1989 Page(s): 4 -13
4. Sakahara, M.D. 100 ns Synchronization and the Users of Loran-C. Position Location and Navigation Symposium, 1988. Record. Navigation into the 21st Century. IEEE PLANS 88. IEEE , 1988 Page(s): 518 -522
5. 高厚磊,江世芳,贺家李. 数字电流差动保护中几种采样同步方法. 电力系统自动化,1996,20(9)
6. Masami Kihara,Atsushi Imaoka. System Configuration for Standardizing SDH-based Time and Frequency Transfer. European Frequency and Time Forum,No.418,pp.465-470,1996
7. M. Kihara,A. Imaoka. Timing and Time Signal Distribution in Digital Communications Networks. Proc. of the 6th EFTF,pp.489-492,1992
8. A. Imaoka, M. Kihara. Accurate Time/Frequency Transfer Method Using Bi-directional WDM Transmission. Paper 31, the 27th PTTI Applications and Planning Meeting, 1995
9. "1992 Federal Radionavigation Plan" Dot-VNTSC-RSPA-92-2/Dod-4650.5, Stock No. 008-047-0042-8, U. S. Government Printing Office. Washington, D. C. 20402.
10. 江道灼,马进,章鑫杰. 锁相环在电力系统现场测控装置中的应用. 继电器,2000,28(8):43~45.
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)