|
1 引言
列车用真空集污系统该系统用于对铁路旅客列车厕所污物的收集,避免沿路外排对铁路沿线的污染。系统主要由蹲便器、坐便器、中间箱、污物箱、灰水(洗漱用水等)收集系统、电器监控系统组成。其中监控系统由主控制模块、便器冲洗控制模块和灰水收集控制模块组成。主控制模块控制中间箱的动作(包括真空的形成、排空等)和污物箱的动作;便器冲洗模块主要控制便盆的冲洗和排空;灰水收集模块主要控制灰水的排放;主控制模块还具有系统的故障显示存储和对外(车上、触摸屏终端设备)等信号输出的功能。 2 监控系统组成
真空集污系统电器监控部分主要由研华软逻辑控制器ADAM-5510kW、ADAM-5051S+ADAM-5056S+ADAM-5055S+ADAM-5068、ADAM-4055模块组成;终端人机界面设备采用Proface公司的GP37W2-BG41-24V型触摸屏,内嵌组态软件,支持Modbus协议。系统结构功能框图如图1所示: 
图1 列车真空集便监控系统的组成及架构
3 系统功能实现
3.1 人机界面接口
采用Proface公司的GP37W2型触摸屏,有2个串口:一个为编程口,通过主机配置触摸屏的设置、通过组态软件编写人机界面并下载到触摸屏中运行;另一个为通信口,触摸屏通过此通信口采用Modbus RTU Master协议和ADAM-5510kW的COM1口交换数据、传递信息。触摸屏的功能:显示目前系统的状态:待机、冲水和各种故障;显示各控制模块的所有输入、输出及其状态;显示所有计时器及其设定值同时可以进行参数设置并下传到ADAM-5510kW中;显示故障状态及冲洗的次数;能通过触摸屏对各种动作进行手动操作,例如打开某个阀等等。
3.2 ADAM-5510kW软逻辑控制器
作为软逻辑控制器,ADAM-5510kW有很多优点,对于本系统来讲,实时多任务功能,应用kW公司的Multiprog软件采用梯形图(LD)/功能块(FBD)编程,COM1口的ModBus RTU Slave协议,COM4口的ModBus RTU Master协议外挂ADAM-4055模块进行远程控制,大容量存储空间,电池备份区,可以存储Source files,功能丰富的库函数…等等。
作为控制的核心部分,通过在主机上的Multiprog软件进行编程、编译,并下载到ADAM-5510kW中运行,根据程序流程控制,对输入模块进行监测,对输出模块进行控制,对远程模块进行状态监控,和触摸屏进行数据交换等。
3.3 ADAM-5000 I/O模块
本系统采用了数字量输入模块ADAM-5051S、数字量输入/输出模块ADAM-5055S、数字量输出模块ADAM-5056S、继电器模块ADAM-5068。
(1) ADAM-5051S,带光电隔离,输入信号支持高电压到50V,带LED输入指示灯。
(2) ADAM-5055S,带光电隔离,既有输入也有输出,输入支持干节点和湿节点,输出是集电极开路可提供40V/200mA电流输出。带LED输入指示灯。
(3) ADAM-5056S,带光电隔离,输出是集电极开路可提供40V/200mA电流输出。带LED输入/输出指示灯。
(4) ADAM-5068,8路A型继电器通道,触点容量支持AC:120V@0.5A,DC:30V@1A数字量输入模块在系统中接各种功能按钮如复位按钮、污物箱手动排空、防冻排空等;接开关信号如中间箱液位信号、污物箱液位信号、各种压力信号、灰水收集模块的输入信号等。
(5) 数字量输出模块在系统中接各种指示灯,包括中间箱压力指示灯、真空压力指示灯、污物箱满度指示灯、防冻排空指示灯、系统报警指示灯、灰水故障指示灯、冲洗按钮故障、通信连接指示灯等等。
(6) 继电器模块控制各种电磁换向阀,分别控制便盆排泄阀、灰水收集罐排放阀、压缩空气输入阀、输出阀等等。
3.4 远程模块
本系统采用了ADAM-4055,8路数字量输出和8路数字量输入,输入支持干节点和湿节点,湿节点支持高电压到50V;数字量输出是集电极开路可提供40V/200mA电流输出。带LED输入/输出指示灯。支持Advantech的ADAM ASCII协议和Modbus RTU slave协议两种协议。在本系统中采用ModBus协议。远程模块采用RS-485串口方式和ADAM-5510kW的COM4口连接,由ADAM-5510kW对其进行控制。
远程模块用来监控冲洗模块,输入信号接便盆高液位信号输入、排泄阀磁性开关输入、冲洗按钮;输出信号控制电磁换向阀(冲洗控制)、故障指示灯等。因为冲洗模块分别安装在列车厕所便池旁,而ADAM-5510kW主控模块安装在列车的过道顶部,两者距离较远,所以通过RS-485进行远程控制。而在ADAM-5510kW系统中对ADAM-4055的配置及编程实现也尤其方便。 4 ADAM-5510kW支持的协议及方式
在本系统中,对ADAM-5510kW使用了三种协议:COM1口Modbus RTU slave协议,COM2口Multiprog协议,COM4口Modbus RTU master协议。
4.1 COM1口
COM1口使用Modbus RTU slave协议和触摸屏进行连接,采用RS-232方式。
4.2 COM2口
COM2口使用Multiprog协议和主机上的Multiprog软件进行连接,编程下载、在线监控等,如图2所示: 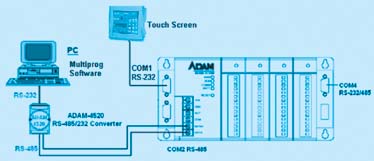
图2 COM1口通过ModbusRTU slave协议连接触摸屏
COM2口通过Multiprog协议和主机连接
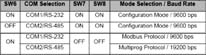
注意:ADAM-5510kW的拨码开关设置如下(无需软件设置):
4.3 COM4口
COM4口使用Modbus RTU master协议和ADAM-4055远程模块进行连接,如图3所示: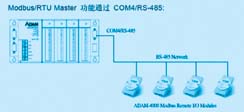
图3 COM4口通过Modbus RTU master协议和远程ADAM-4000模块连接
只需先在ADAM-4000utility中将adam-4055的协议更改为Modbus协议,然后在Multiprog软件的I/O Configuration中进行如图4所示配置即可(无需硬件设置)。 
图4 在Multiprog中设置ADAM-4055模块
5 软件系统编程
5.1 Proface触摸屏的监控软件
在主机上编写Proface触摸屏的监控软件,并下载到Proface触摸屏中运行。编写如图5所示,运行在触摸屏上的一些界面如图6所示。 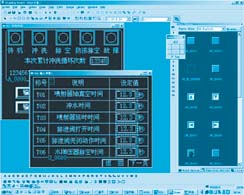
图5 在Drawing Board中编辑触摸屏界面 
图6 运行在触摸屏上的画面(适时和ADAM-5510kW通信)
5.2 ADAM-5510kW软件编程
在主机上运行MULTIPROG软件,在此软件中编辑程序、编译、并下载到ADAM-5510kW中运行,同时可以在MULTIPROG软件中在线监控程序的执行。MULTIPROG编程软件遵循IEC61131-3标准,同时支持IL、ST、FBD、LD和SFC五种编程语言,支持多任务同时运行。软件编程分为6个步骤。
(1) 新建Project,选择ADAM-5510模板、资源设置(resource setting)、配置系统I/O模块(I/O configure).配置系统I/O模块指根据选用的本地I/O模块和远程I/O模块分别加载。配置好所有参数后,就可以通过Project Control Dialog下载所有配置。
(2) 在Logic POU中进行编程,可以选用IL、ST、FBD、LD和SFC五种编程语言中的一种,其中FBD、LD和SFC可以在同一个POU中混合编程。本系统中采用FBD、LD和ST语言进行编程。
(3) 在Task中添加任务,并关联相关程序。在本系统中使用了Default Task、Cyclic Task、Event Task和System Task,四种task形式全部使用。
(4) 程序编写完成后,进行编译,如果出现Error和Warning,支持错误定位并修改程序。
(5) 通过Project Control Dialog下载程序,并运行,可以选择Debug来在线调试程序、监控程序的运行。
(6) 当系统程序开发完毕,还可将源程序(包括工程文件、库、POU和Task等)下载到ADAM-5510kW中进行备份保存;也可通过Multiprog软件将源文件上传上来。
在Multiprog软件中操作如图7所示。 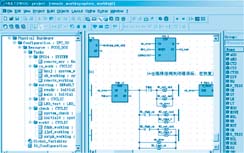
图7 Multiprog软件中的功能实现 6 结束语
列车真空集便监控系统以前采用的是单片机控制,但单片机系统存在系统维护不方便、运行速度慢、系统扩展功能差、开发周期长等缺点。采用ADAM-5510kW,不仅有效解决了上述问题,而且系统运行的可靠性、稳定性得到提高,更为可贵的是ADAM-5510kW很方便支持Modbus RTU Master/slave协议,编程简单、明了,架构开放性好,减少了系统开发调试的时间,得到各方一致好评。
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)