江全元1,程时杰1,曹一家2,
1. 华中科技大学,湖北 武汉 430074;2. 浙江大学电机系,浙江 杭州310027
1 引言
电力系统次同步谐振(SSR)作为一种极其严重的稳定性问题,最初出现在带串联电容补偿的远距离输电系统中。随后在HVDC、PSS、汽轮机调速器及励磁系统中发现, 由于不恰当的控制策略引起的汽轮发电机轴系扭振。随着串联电容补偿、高压直流输电的广泛应用及SVC、ASVG、UPFC、TCSC、SMES等FACTS器件的出现,研究大型复杂电力系统的SSR问题就成为电力系统灾变防治中的一个重要组成部分。
目前研究SSR的解析方法如特征值法、复转矩系数法等都是对系统在平衡位置作线性化基础之上进行的,属于逐点法的范畴,在分析包括电力系统的汽轮发电机组轴系这一非线性系统的稳定性时,存在的问题是所得的结论不具有普遍的指导意义,无法给出稳定的裕度,同时在估计连续变动的电力系统稳定性时,必须不断线性化计算特征值或阻尼系数,这显然无法满足在线应用的要求。而域的方法与逐点法截然不同,一旦得到描述系统运行状态的稳定域,则只需检查运行状态是否落在稳定域内即可判断系统的稳定与否。因此用域的方法研究电力系统次同步谐振现象具有重要的意义。
Lyaponov直接法在电力系统中应用了三十多年,其最大的优点在于它是理论上严格的判断稳定性的充分条件,可以提供稳定域的可视化描述。文献[1]首先应用大系统的Lyaponov分解法研究电力系统SSR问题,但该方法是在对系统线性化处理的基础上进行的,故只能进行小扰动分析,另外在轴系方程的维数增加时处理将相当困难。文[2,3]把汽轮发电机轴系简化为两段,研究了轴系在平衡位置的稳定形态,对稳定平衡位置给出了稳定域的估计。但同样无法解决维数增加时分析的困难。且该方法给出的稳定域非常小,不能对运行状态提供有意义的指导。
本文首先把汽轮发电机轴系方程转化成标准鲁里叶型控制系统,推导出该系统稳定的充分条件,给出了一类具普遍意义的鲁里叶型Lyapunov函数。将该函数分别对两段和六段轴系的IEEE第一基准模型进行了计算,确定了其稳定运行域,最后用MATLAB的仿真结果表明了该方法的有效性。
2 轴系方程的标准鲁里叶型
根据IEEE第一基准模型[4],汽轮发电机轴系由高压缸(HP)、中压缸(IP)、两个低压缸(LPA和LPB)、发电机(GEN)及励磁机(EXE)等组成一个六质量弹簧系统,如图1所示。
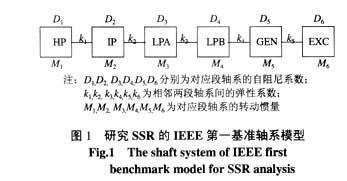
根据轴系的机械动力学特性,在忽略轴系互阻尼及励磁机电磁转矩,时间的单位为s,角度的单位为rad,其他量均用标幺值表示的情况下,可以列出如下轴系运动方程[5 ]:

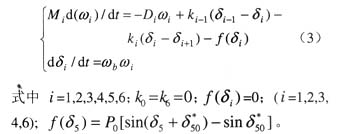
显然,式(3)是一个标准的鲁里叶型控制系统,为了简便起见,将它改写为
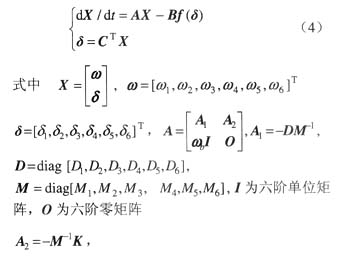
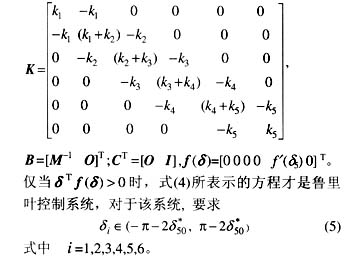
至此, 由式(4)和(5)确定了轴系的标准鲁里叶型。
3 鲁里叶型Lyapunov函数的构造
对于鲁里叶系统,一般可以构造如下的Lyaponov函数[6]:

式中 P是Lyapunov矩阵方程ATP+PA=-LLT的对称正定解。文献[7]在研究电力系统暂态问题时,提出了一种新型的Lyaponov函数,其形式如下:
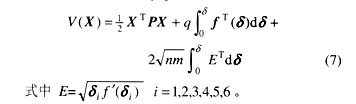
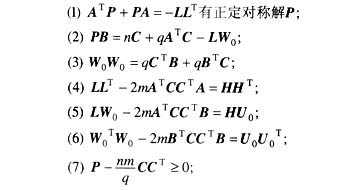
当 m=0时,式(7)就变成式(6),即式(6)是式(7)的一个特例。故下面的讨论仅针对式(7)所示的Lyaponov函数进行。对于鲁里叶控制系统,其系数矩阵必须满足一定的条件以保证式(6)所示的表达式是Lyapunov函数。由文献[7]可以知道,下列条件是充分的:
(8)Z(s)是正实的,且无零极点相消。
其中 Z(s)=(n+qs)CT(sI-A)-1B,由于A矩阵正半定,故条件(1)成立。条件(8)成立的充分条件是qDi-nMi>0,证明见附录B。
故可取U0+0和W0=0,则以上条件可简化为

只要此条件成立,式(7)所示的函数就是Lyapunov函数。
4 IEEE第一基准模型的稳定域及时域仿真结果
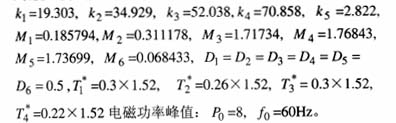
由文献[4]可知IEEE第一基准模型轴系的参数见附录A,稳定域的求取方法与文献[8,9]相同。在δ1-δ6,ω1-ω6这12个变量中任意给定10个的情况下,可以在1个平面上得到另外2个变量的稳定域。
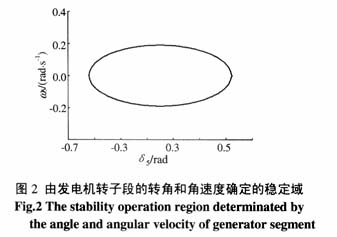
对式(7)分别取不同的n,m,q,可得到由发电机转子段的角速度和转角所确定的稳定域。图2是在n=1.0,m=0.008,q=10,δi=0,ωi=0(i=1,2,3,4,5,6)的情况下在平面上所确定的稳定域。必须说明,由式(7)所确定的稳定运行域比式(6)所确定的稳定运行域大,但在本算例中差别很小,故没有加以比较。
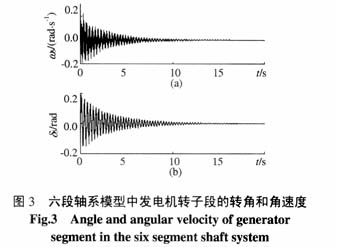
取稳定域内的点δ5=0.3,ω5=0.1作为初始条件,利用MATLAB进行时域仿真,可以得到所有轴系变量随时间的变化规律。图3是发电机转子段角速度偏差ω5、转角偏差δ5随时间的变化规律,可以看出,在此稳定域内,轴系最终将回到平衡位置。
为了更进一步的研究稳定域对轴系扭振的影响,在同样的取值条件下,得到了相邻轴段的角速度差随时间的变化规律如图4所示。由图中可看出,相邻轴段的角速度差最终趋于0,故不会发生轴系扭振。用同样的方法可以得到其他轴段的稳定域,从而可以实现逐段扫描。为了与文献[2,3]中的结果相比较,本文对简化的两段轴系进行了计算,参数与文献[2,3]相同,对于式(1),取 n=0.5,m=0.0075,q=10,在给定δ1=0.1,ω1=0.1,ω2=0.5的条件下,得到的稳定域为δ2∈(-0.69,1.40),这比文献[2,3]中的估计稳定域要大得多。取初始值δ1=0.1,ω1=0.1,δ2=0.5,ω2=0.5进行计算,δ2,ω2随时间的变化曲线如图5(a)、(b)所示。显然,在该初值扰动下系统是稳定的。图5(c)给出了轴系角速度差ω12=ω1-ω2的变化规律,在此初值下不会发生轴系扭振。


5 结论
首先把含六段轴系的单机无穷大系统转化成标准鲁里叶控制系统,得到了进行这种转化的充分条件,在满足这些充分条件的基础上构造了一类鲁里叶型Lyaponov函数。对该非线性系统在平衡位置的稳定性进行了详细的分析,分别确定了汽轮发电机轴系的稳定运行域,为电力系统SSR稳定运行域的可视化描述提供了新的思路。由于该方法是针对非线性系统的,故不仅对小干扰下静态稳定和低频振荡、大扰动下暂态稳定适用,同时提供了一种解析的、采用逐段扫描进行轴系扭振分析的方法。对IEEE第一基准模型的时域仿真结果表明了该方法的有效性。
必须说明,本文只是应用域的方法和Lyaponov直接法对电力系统次同步谐振的初步研究结果。如何进一步减小Lyaponov直接法固有的保守性及如何考虑更复杂的电力设备,尚须进一步探讨。随着具有离散的、非光滑特性的电力电子器件在电力系统中的广泛应用,我们将考虑使用Lyaponov直接法和域的方法对含HVDC、FACTS器件的电力系统进行SSO的分析。
附录A
汽轮发电机组轴系参数:
附录B
定理:Z(s)=(n+qs)CT(SI-A)-1B正实且无零极点相消的充分条件是qDi-nMi>0,(i=1,2,3,4,5,6)。
证明:
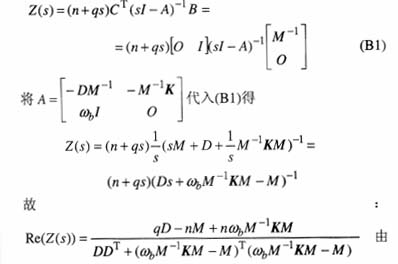
于K是半正定矩阵,故只要qD-nM正定,即qDi-nMi>0,(i=1,2,3,4,5,6),则Z(s [1] [2] 下一页
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)