|
ժҪ��������������������ƽ̨�����ϵͳ��Ӳ�����ü�������ɡ���ϸ˵���˸�ϵͳ�������ݵIJ������൵�����Ŀ��ơ����ݵļ����ɼ������⣬�������˻��ڴ�ƽ̨��ɵĵ���Ԫ����ӦPID���Ʋ��Լ����Ż�ʵ�顣
�ؼ��ʣ��������ƣ�����ƽ̨��������ϵͳ
The study of a tension control testbed and its monitor syst em
GUO Shuai��HE Yongyi��YAO Zhiliang��FANG Minglun
(School of Mechanical Engineering & Automation under Shanghai Uni versity,Shanghai 200072,China)
Abstract��This paper describes the hardware configuration of a tension control test��bed a nd its monitor and analyzing system,and analyzes the process data measurement,mu ltilevel��tension control,supervisory and data acquisition.Finally,a neural cell PID control strategy and its optimization process are verified though experimen ts on this test bed.
Key words��tension control;testbed;monitor analyzing system
0 ����
�������Ƽ������ǹ�ҵ�����о��й��ԵĻ��������������и��Ĥ����˿����װ����֯��ӡˢ��ұ��ȹ�ҵ���������Ź㷺Ӧ�á�
��ҵʵ�����������е�����������һ����ʱ�䡢�����Ե�ϵͳ�����б�������为�ء�ǿ�Ŷ���һϵ���ص��1�ݡ���ͳ�Ļ�������ģ�͵Ŀ��Ʋ�����Ӧ����ʵ�������л�� ���ܴ�Ŀ������������������Ƶ��ص㣬�����Ż��Ķ���ѧģ�ͣ������ģ�ͷ����������Ч�Ŀ��Ʋ����ǽ��������������Ĺؼ���
Ϊ����ϸ��١��߾������������������ơ����ԺͿ��ˣ������������Ʋ����Ż���������һ���ӽ�ʵ�ʿ��ƶ��������Ƹ������Ե�����ƽ̨�������ڴ�����ƽ̨����������������Ҫ���������������ɼ�������ϵͳ��
1 ����ƽ̨��е����
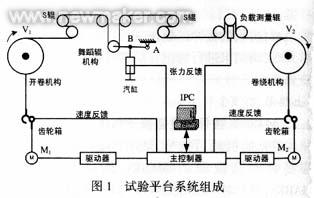
��ͼ1��ʾ������ƽ̨�Ļ�е������Ҫ�ɿ������������������������ƻ����Ȳ�����ɡ�����ƽ̨�У��������εķָ���û�еʽS����ʵ�֡�����ƽ̨��2��S���������߷�Ϊ3�������Ρ�
1�����������Σ����ڽ�����չƽ��
2���м������Σ�����ʵ�ֲ�ͬ�������ն���������Ҫ��
3�����������Σ���һ��������Ҫ���ijɾ���
������������������ƶ����������ľ����кܴ��Ӱ�죬ʵ�������г��õ���������ʽ�IJ��������������ز����ͣ�Load cell�����赸�������ͣ�Dancer arm����Ϊ�˶����ֲ������� ���IJ������ȼ���Ӧ�ٶȽ��з����о���������ƽ̨�IJ�ͬ�����ηֱ�װ����������ʽ�IJ���������
1.1���ز����ͣ�3��4��
���ֲ�����ʽ��Ӧ�Ƚ��صIJ��Ϻ����Ŀռ䡣����������ֱ�Ӳ����������Ĵ�С�����������ơ����������в������̶���������ˣ����ڴ������ͣ��������İ�װ�����ǿ��ƵĹؼ� ����ȱ�������ڲ������̶�����������������ֵ��������ˣ������������豸���еļӼ��ٲ���̫�졣
1.2�赸��������
�赸����������һ�ּ����������ϵͳ����ʵ����λ�ò���������3������ɣ�����Ϊ�̶������м�Ϊ�ڶ�ʽ���������ڰڱ�����һ���ɵ���ѹ�������ף�����һ�������ڱ۵�λ�ƴ� �������������ϴ��ĵ�������С��������ѹ���������������������ġ�
�赸����������ϵͳ�������з����仯����ʱ��ȥ����ǰ���ٶȲͨ����������λ���ƶ�����Ѹ�ٱ��������ĺ㶨�������������ʽ��������ϵͳ�ڼ������仯���������� ��ݵĶࡣ������ʽϵͳ����һ�������ŵ㣬�䱾������һ�����ܻ����������������� �������ã��Դ�Χ����������������ջ������á��������͵IJ���������С��������ϵͳ Ӧ�õĽ϶ࡣ
2 ��������ϵͳ����
2.1 ��������ϵͳ�������
����������Ҫ�ɼ����ض��������״̬�����ƺͿ����ŷ������ת�ټ�λ���źţ���������ת��ֵ�������趨ֵ�ȡ����⣬Ϊ�˱����ڵ��Խ��Ż����Ʋ��ԣ�ȫ���������������� �����ܣ���Ӧ�ɼ��������ݣ���¼�ŷ���������ת�ء�������ʱ�����ߵ�һϵ�в�����
������������������ϵͳ�����ϡ���λ���ṹ����λ����Ҫ������������㷨�����㡢�����ʵ�����ݵļ�⡢�����ȹ��ܣ���λ����Ҫ����������Ƶȹ��ܡ���λ������λ��ͬ�����Ӻͼ�¼����������ݡ�����֮������ݽ���ͨ������ͨѶ�õ���
2.2 ��������ϵͳӲ�����
2.2.1�������
ʵ��ϵͳ�м������Ҫ��������;����һ��ʵʱ���ʵ��������ݡ����ػ���װ��ר��Ϊϵͳ���������ݲɼ�������������Ӧ�ó���Ϊ�������ݽ������ֶ�̬���ߣ���ɶ�ʵ���� �ݵķ����������ȹ�����
��һ����;����������������㡢����������ʵ�ּ��Ż��Ƚ������㷨���о���Ա��IPC������㷨�����㼰�Ż���ͨ��JTAG�ӿڣ�����IEEE1149.1�����ѷ�����Ժ��㷨�������ص�����������DSPоƬ��FLASH�С�
���������ṹ����������п���ʱ�쿴CPU�ڲ�������Ĺ��������Ϊ����ĵ��ԺͿ��Ʋ� �Ե��Ż��������㡣
2.2.2����������
�������Ƶ�������������ϵͳ�ṹ��ͼ2��ʾ��������оƬѡ���ͺ�ΪTMS320LF2407A��DSPоƬ��������ɶԸ���ʵʱ�����źŵĴ�����������λ������������ܿ����㷨ʵ�֡�

����������ʱ��ʵʱ�ɼ����ض���������źţ���ģ�����·����Ҫ�ɵ� ѹ�Ŵ��˲���V/Fת����·���ɣ������DSPоƬ��DSPоƬ�IJ�����ģ���CAP4ͨ���Ը������źż������ڶ�ʱ�жϴ��������аѼ���ֵ���趨ֵ�Ƚϣ�ϵͳ���ݲ�ֵ�ɿ����㷨���д����������Ӧ��Ŀ��Ƶ�ʵ������Ըı�����ת�١�
�ⲿ����RAM��Ҫ���������ⲿ��������á����籣��RAM��Ҫ�������ϵͳ��Ҫ�洢��һЩ��Ҫ���������⣬�������������ϻ�����������ı�Ƶ��·��������ϼ�������·���ⲿ��չ�ӿڡ�RS232ͨѶ�ӿڵȵ�·��
2.2.3ת�زɼ���
ϵͳ����PI900ת�زɼ����Կ����ŷ������ת�ؽ��в���������С�������Ϊ10 ms��ʹ��ʱ���ɼ������빤�ػ�ISA��ۣ����ֱ�3�鿨��I/O��ַ����Ϊ300H��31FH��340H��35FH ��380H��39FH���жϺ�����ΪIRQ10��IRQ11��IRQ12��
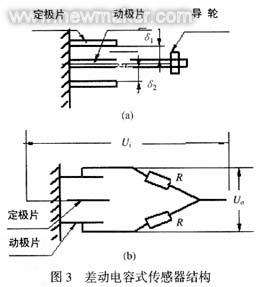
2.2.4�����ʽ��������2��
�����ʽ����������������װ�õĺ����������乤��ԭ����ͼ3��ʾ��������Ϊ��ʱ����ʼ�����1=��2��S=��1+��2�������ض������������ڵ�������ʱ������Ƭ�����ƶ������뷢���仯���ģ�������Ҳ��Ӧ�����仯��C������Ա仯��Ϊ��C/C��������ı仯�����ĺ�Сʱ��������Ϊ���ݵı仯����C�릤�Ľ��Ƴ����Թ�ϵ���þ���仯��ͨ��ͼ3b��ʾ�ĵ��ŵ�·ת��Ϊ�������پ����������װ�ô�������ʾ���¼���ض���������
2.3��������ϵͳ�������
���ݼ�⡢����������Ϊ�������ṩ��ݵ����ݷ������ߣ��Լ�ʵʱ����ʷ�������ߣ�ϵͳ��ʹ�õ�Ӧ�ó�����Ҫ���������ͼ��ϵͳ��������Ϣϵͳ�����ݼ�¼ϵͳ������ϵͳ�ȡ�
ʵ���߿����������ݷ����ʹ���������ʵʱ�ɼ������ݽ��з������Կ��Ʋ��Խ�����������һ���Ż����Ʋ��ԡ��ı���ƻ��ڲ����Ի�ò�ͬ��ʵ������
3 �������Ʋ��Լ�����
3.1��������ԭ��
��ͼ1��ʾ����������ϵͳ�������������Ľ����ŷ����ƽṹ����ֱ�Ϊ�ŷ�������ٶȻ���λ�û��������ջ���
�������������������һ�������������������ס��̶��������ܵ���ʽ������������������ ���ϵͳ����ͼ1��ʾ����������װ�ڿ���A�������°ڶ��������ϣ��������������������趨�������������������������ź�������ѹ��ת������E/P���������ṩһ��ѹ����ѹ�����������ף���������֧�������Ѹ����������·����Ž���Ĥ����ɿ����������趨��
������ij��ԭ������ֱ���仯�����ض�����ϲ��������ϵĵ������Ա��Ρ��Ŷ�������Ӱ�죩�������վ�����ٶȲ�ͬ��ʱ�������������������£����Ϸ����·��ƶ��������������°ڶ�ʹ�þ��ܵ���ʽ��������������ͼ3b��ʾ���Ķ���Ƭ�������»�������ˣ��ӵ���������˵ĵ�ѹ�źŷ����仯��������ѹ���趨��ѹֵ�ȽϺ������������ı���������Ƶ�ʣ��Ӷ�ʹ�����ŷ�����ٶȷ�����Ӧ�ı仯��ά�������ĺ㶨��ʹ����������˳�����С�
3.2�������Ʋ��Լ�ʵ��
����ƽ̨�Ͽ���ɶ��ָ������������㷨�������硢�����㷨��ģ�����ۡ�DNA����������ȣ����о������в��û��ڵ���Ԫ������ӦPID�����㷨��5�ݽ������顣
����Ԫ����ӦPID�������ṹ��ͼ��ͼ4��ʾ��ͼ��ת����������Ϊ�����趨ֵr��k����ʵ��ֵy(k)�����Ϊ��Ԫѧϰ��������Ҫ��״̬��x1��x2��x3����ԪPID�����������Ϊ��


ʽ�У�u(k)Ϊ��k�β�������������ֵ��kΪ��Ԫ�ı���ϵ����k>0��wi(k)Ϊ��Ӧ��xi(k)�ļ�Ȩϵ����
�ڵ���Ԫ������������������ƽ���Ķ���������ָ��J��ͨ������Ԫ�������ļ�Ȩϵ��wi��k����ʹ����ָ��������С���Ӷ�ʵ������ӦPID�����ſ��ơ�
�����������ָ�꺯��Ϊ��

ʹ��Ȩϵ��wi(k)����������J�ļ�С������wi��k���ĸ��ݶȷ�������������wi( k)�ĵ�����Ϊ��
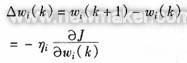
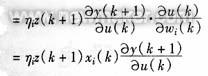
ʽ�У���i(i=I��P��D)Ϊѧϰ�ʡ�
�������㷨���й淶�����ɵ�ѧϰ�㷨���£�

����ѡȡ��
3.3����������
������ϵͳ���õļ���������߷ֱ���ͼ5��ͼ6��ͼ7��ʾ��

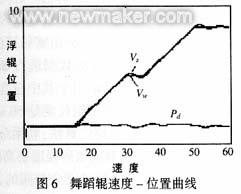
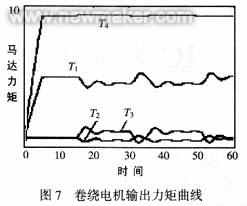
��ͼ������֪��Kֵ����ѡȡ��������������ϵͳ��Ӧ��������KֵҲ���ܹ�С����С��ʹ���ɹ��̼ӳ�����ˣ�����ȷ��һ������������K���ٸ���ʵ�ؽ�����е��������ڲ����˹淶��ѧϰ�㷨��ѧϰ���ʦ�p����I����D��ȡ��Щ��������̴ӳ�������ƽ�ȵ�ʱ������������Ӧ�p����D�������æ�I��
���þ�����ѧϰ������Ӧ�����ĵ���Ԫ�����ɵ���Ԫ����ӦPID�������������ṹ��ѧϰ�㷨����������ȷ��������С����������Ӧ�����仯�����н�ǿ��³���ԡ�
4 ����
��������Ƶ�������������ƽ̨�Ѿ����ɲ�Ͷ������Ӧ�á�ʵ����������ܹ�ģ�ҵ��������ʵ����������Ĺ���Ϊ�����ҵ�����и��١��߾����������Ʋ��Ե��о��ṩ����������Ϊ�����������Ŀ��������ԡ��Ż��������ṩ��һ�־��ö���Ч���ֶΡ�
�����
��1��G.F.Franklin,J.David Powell.Michael Workman,Digital Con trol of Dynamic Systems��M��.Addison��Wesley,1998��
��2�����ں�������Ӣ��������.��֯�����е�ɴ���������Է�����J��.���������磬2004����1����28-29.
��3��N.A.Ebler��R.Arnason��G Michaelis.Tension Control:Dancer Rolls or Load Cells��J��.IEEE Trans.on Industry Applications,1993��29(4)��727-739.
��4��ʷ������������������.ͭ������¯������С�������Ƶ��о���J��.����ҵ�Զ�����2004����4����47-49.
��5��������.����PID���Ƽ���Ӧ�ã�M��.��������е��ҵ�����磬2002.
|





 ���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ���
���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ���