|

摘 要:运用二元函数的泰勒展开式给出了应变与温度交叉灵敏度大小的公式,阐明了其物理意义,并结合实际测量数据估计了交叉灵敏度;对于实际使用传感器和进行补偿具有一定的指导意义。
关键词:压阻式传感器;应变;温度;交叉灵敏度
Analysis of the Strain of Piezoresistive Sensor and Temperature Crossed Sensitivity
ZHAO Fan
(Shanxi University of Technology, Hanzhong 723003, China)
Abstract: With the help of Thaler expanding formu la of dualistic function, the author gave the formula of computing the strain a nd temperature crossed sensitivity, explained the physical meaning. Combining real measurement data, he evaluated the crossed sensitivity.
Key words: piezoresistive sensor; strain; temperature; crossed s ensitivity
1 应变与温度交叉灵敏度计算公式的给出
压阻式传感器是在圆形硅膜片上扩散出四个电阻,这四个电阻接成惠斯登电桥。假设四个扩散电阻的起始电阻都相等且为R,当有应力作用时,两个电阻的阻值增加,增加量为ΔR,两个电阻的阻值减小,减小量为ΔR;另外由于温度影响,使每个电阻都有ΔRT的变化量。若电桥的供桥电压为U,则它的输出电压为:

式中:πL―压阻系数;E―电阻半导体材料的弹性模量;S=πL・E―传感器的灵敏度。
根据四个电阻本身的温度特性,设它们的温度系数为α,则:

当传感器受应变ε和温度T的作用,则由泰勒公式在初始应变ε0和环境温度T0下将式(4)展开得:
 灵敏度,当不考虑温度影响时,该项为常值;SεT=USα,定义为应变与温度的交叉灵敏度。 灵敏度,当不考虑温度影响时,该项为常值;SεT=USα,定义为应变与温度的交叉灵敏度。
第三项、第四项及以后各项为温度变化项,忽略掉ΔT的高阶项,温度与传感器的输出呈线性关系,令ST=USεα,定义为传感器的温度灵敏度。忽略掉高阶项,式(6)又可写为:
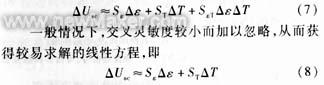
很显然,考虑交叉灵敏度的非线性方程(7)与线性近似的方程(8)相比,求得的应变和温度与实际值较为接近;但当被测量变化较小时,由式(8)可获得足够精确的解,且用线性方程近似求解可充分利用较为成熟的线性方程组的数值方法理沦,使问题大大简化,因此式(8)在实际应用中仍具有重要意义,而参量变化较大时,忽略交叉灵敏度对于求解精度影响较大。
2 交叉灵敏度分析
由交叉灵敏度公式SεT=USα可知:
交叉灵敏度既与传感器应变片自身的压阻系数、弹性模量、温度系数有关,又与电桥的供电电压有关,因此应变和温度同时作用于传感器时,传感器的输出不是应变和温度单独作用时产生的输出量的简单迭加,还存在着热力学和力学量的相互作用,这个作用反映为交叉灵敏度,其大小反映了这种相互作用的程度。
实际上,交叉灵敏度反映了在不同应变时,温度灵敏度不是一个常数,而是随着应变的变化而变化,交叉灵敏度的大小描述了温度灵敏度偏离常数的程度。实验中通过在不同应变下测量温度灵敏度,作出ST-ε曲线,该曲线的斜率便反映了交叉灵敏度的大小。
3 计算实例
以IC Sensors公司的S17-30A型传感器为例,结合A/D转换器AD7731把模拟量转换成数字量―6位16进制原码,再把16进制的原码送入AT89c52单片机,由单片机送出原码值。实验中以标准压力作为输入,测取不同温度条件下16进制的原码值,实验数据如表1所示。

由表1中的数据,利用方程(7)进行计算。首先在同一温度不同压力条件下,然后再在同一压力不同温度条件下借助MATLAB语言分别解矩阵得:
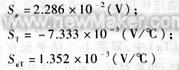
Sε,ST计算结果与传感器自身的技术指标非常接近,而交叉灵敏度SεT的技术指标只能通过上述方法或类似方法求出。
4 结论
利用上述方法借助方程(8)求出Sε,ST,通过对比可知,忽略交叉灵敏度将会带来很大的误差,该方法同样适用于其他半导体传感器。
参考文献
[1]余瑞芬.传感器原理[M].北京:航空工业出版社,1995.
[2]聂铁军.数值计算方法[M].西安:西北工业大学出版社,1990
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)